 少有人走的路
少有人走的路上一讲提到了点云模型的调平和去噪,下一步就是进行三维点云模板匹配。
一.三维物体模板匹配
1.模板图像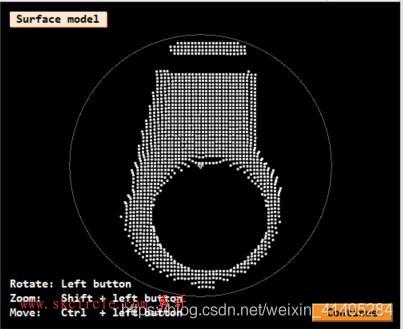
2.模板匹配
我们上一讲中输出的筛选过的点云模型,有连接在一起的部分,连通域拆分是无法拆解的。
三维物体的模板匹配,就是看目标点云与模板之间重合的采样点的比例,占比越高,得分越高。
将输入的点云图与模板各个面做匹配,自动拆分各个模块的点云,输出每个物料的匹配得分以及位姿(Pose)
这里注意:如果匹配输出的Pose与物料数目不相同,调整最小得分参数得分设置的小技巧:例如我的项目是六面空间物体的抓取,则得分不会超过1/6.不要设置过高,否则将会漏掉一部分物体。

二.点云排序
无序抓取过程中,机器抓手会受到很多干扰,所以对于在平台上抓取物料的项目,按点云模型高度从上到下抓取是一个很好的选择。
将上一步模板匹配得到的物料位姿,分别以x,y,z,Rx,Ry,Rz放置在六个数组中。
-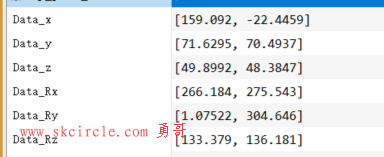
对’Rz’数组进行排序,分别从高到低将点云位姿写到一个数组中

这样就实现了物料点云从高到低排序。
为了直观显示,将第一步创建的匹配模板,仿射到点云位置处。
最后介绍一种写数组的手法
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")

:与C#不同点,鸭子类型,多线程,多进程编程,访问控制,事件委托实现,lambda表达式,常用内置库,为啥说python简单易用?")

:QWidget,QMainWindow")



Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





