一.二维平面确定法向向量
生成两个点,这个算子在Halcon三维中常用。
讲点连接成线
dev_set_line_width(2)
*画点 dev_set_color('red')
gen_cross_contour_xld(Cross1, 90, 103, 16, 0.785398)
gen_cross_contour_xld(Cross2, 377, 341, 16, 0.785398)
gen_contour_polygon_xld (line1, [90,377], [103,341])123456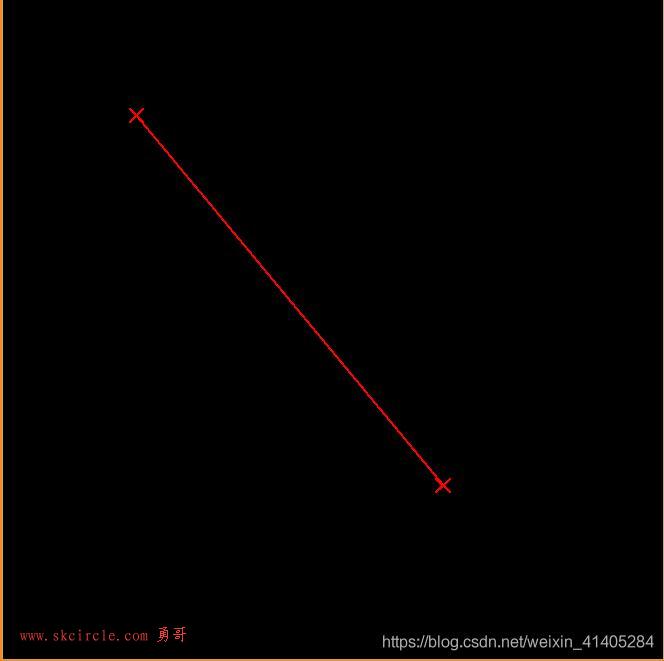
dev_set_color('green')
gen_arrow_contour_xld(Arrow, 90, 103, 377, 341, 5, 5) 12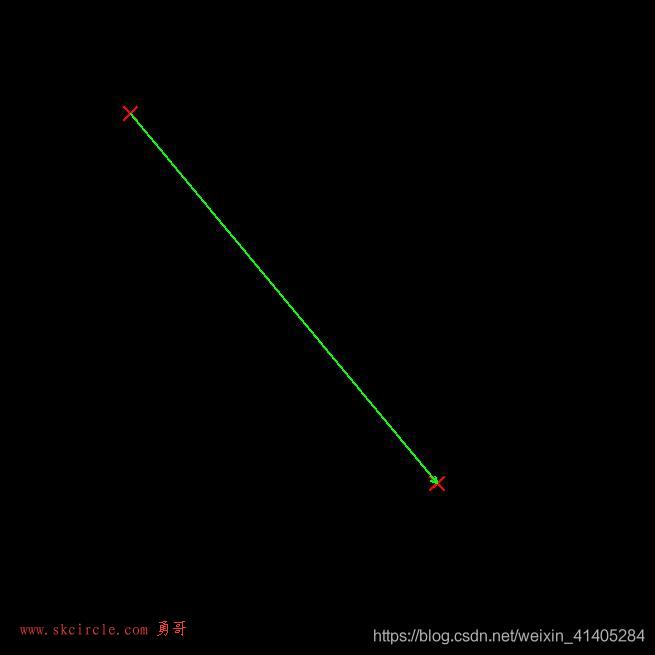
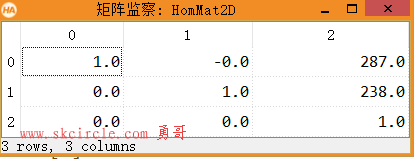
vector_angle_to_rigid(90, 103,0 ,377, 341, 0, HomMat2D)
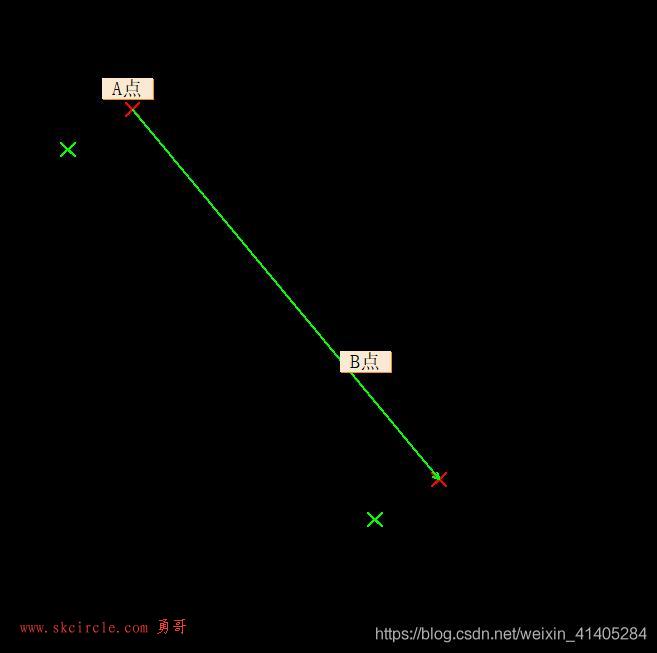
*121 53 这个点 gen_cross_contour_xld(Cross3, 121, 53, 16, 0.785398)
*变换 affine_trans_pixel(HomMat2D, 121, 53, RowTran, ColTran)
*
gen_cross_contour_xld(Cross4, RowTran, ColTran, 16, 0.785398)1234567
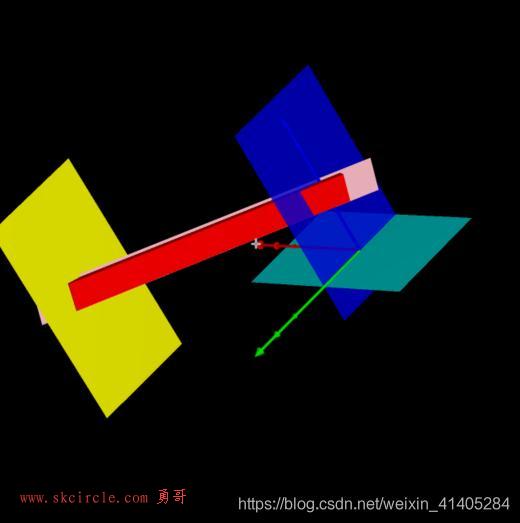
二.三维空间确定姿态
poseLeft:= [0, 0, 50,0,90,0,0]
*VisualizationPlaneSize1,VisualizationPlaneSize2分别是平面宽高
gen_plane_object_model_3d (poseLeft, [-1,-1,1,1] * VisualizationPlaneSize1, [-1,1,1,-1] * VisualizationPlaneSize2, IntersectionPlane_Left)1234
Pose[0]:=poseMiddle[0]
Pose[1]:=poseMiddle[1]
Pose[2]:=poseMiddle[2] 123
转载自:
https://blog.csdn.net/weixin_41405284/article/details/107172801
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:


 少有人走的路
少有人走的路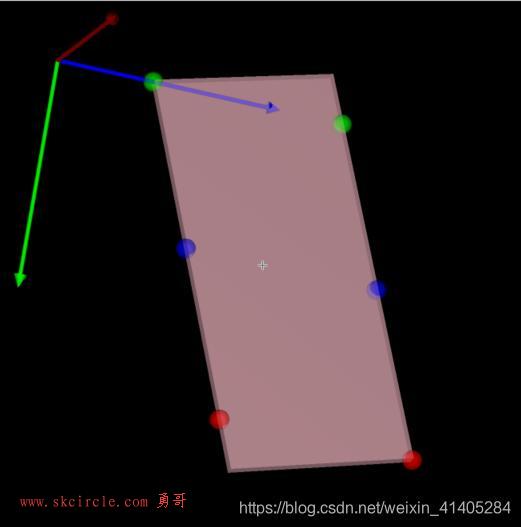


")
")
常用的6种方法")
 封装运动功能")
:枚举,装饰器,self,类的三种类型,特殊方法,oop,代码格式,方法 ,方法返回类型,识别函数返回类型")
:入口函数,运算符,模块与包,py文件 ,基础数据类型,列表")





Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





