 少有人走的路
少有人走的路1.首先对点云以高度方向初步去噪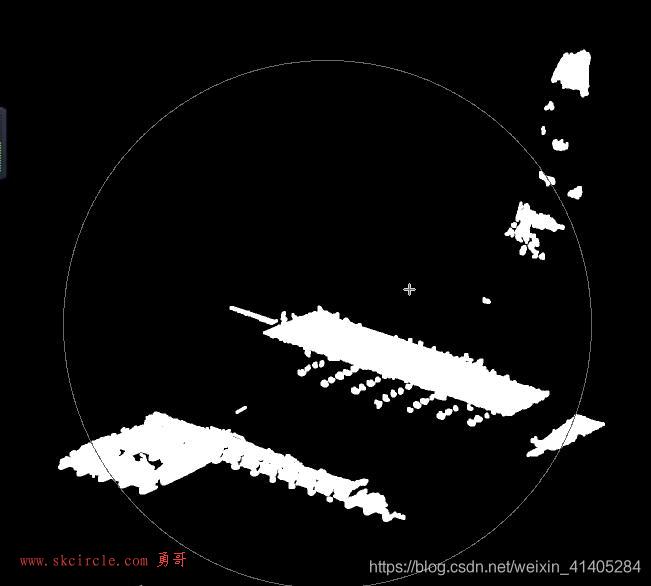
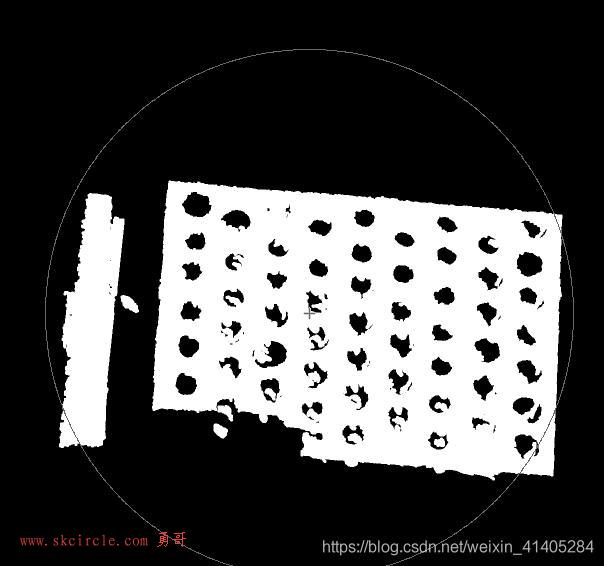
2.点云数据信息提取
对于物料点云的长宽高的判别,最常用的手法是最最小外接矩形,通过获取最小外接矩形的L1,L2,L3,来确定点云的位置。
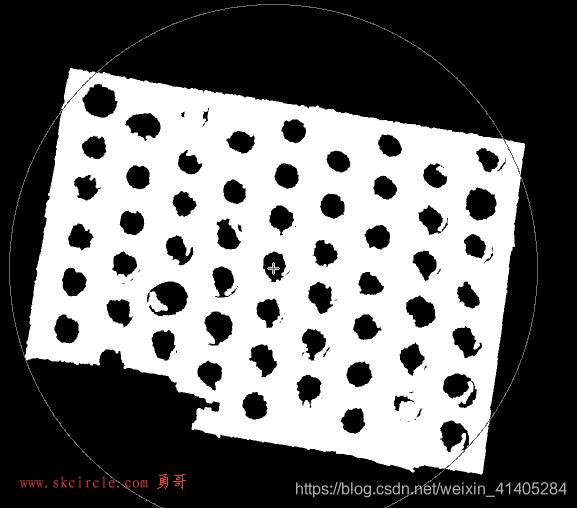
也可以通过一下算子求得点云信息
更正点云分割算子的参数含义
//将4mm内的点云作为一个区域
选取最多点数的点云区域
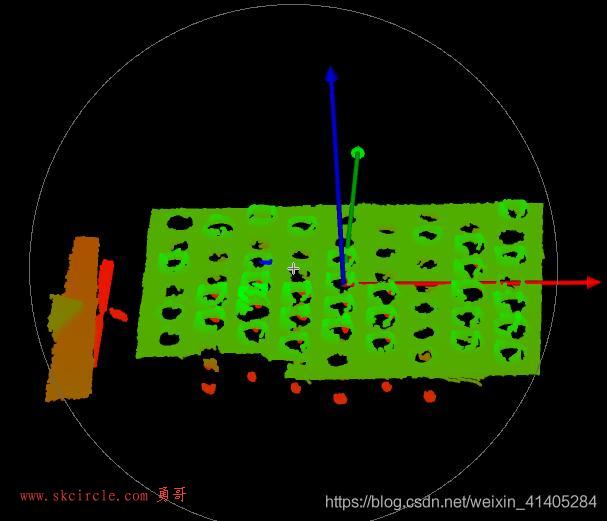
通过拟合光平面的方式求取该点云区域的位姿,拟合光平面采用最大释然法有较强的的鲁棒性,会忽略一些噪声。(此时点云被调平)
转载自:
https://blog.csdn.net/weixin_41405284/article/details/107775584
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")

:随机对象源,用于生成随机摆放的物料")





Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





