 少有人走的路
少有人走的路阈值分割引言
C#
阈值分割有非常多的算法,大体上分为全局和局部算法。 全局算法包括全局固定阈值和基于图像直方图的阈值,局部算法包括局部动态阈值分割。 基于图像直方图阈值分割的方法也有很多,比如常规的高斯滤波双峰法,OTSU大津法。 但是这类所有的法都基于一个假设:图像是有前景和背景的,待分割目标处于背景中,即图像直方图是双峰的。 如果因为非均匀光照导致待分割目标不处于背景或前景中,即图像直方图无双峰, 那么基于图像直方图的所有法都是不甚理想的 只能在此基础上进行一定的变换,例如nbl算法等,这些都属于局部算法。 任何算法,都会基于假设空间的。没有假设空间,所有算法性能一致。包括经典算法和深度学习算法。 本系列的贴子勇哥通过实验来细品它们之间的差别,以求以后可以精准应用。
hysteresis_threshold
它是一种局部域值分割的算子,通常用于对边缘图像(找边缘算法生成的图像)进行找边。
举个首栗:
read_image (Image, 'fabrik')
get_image_size (Image, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width, Height, 'black', WindowID)
dev_set_color ('red')
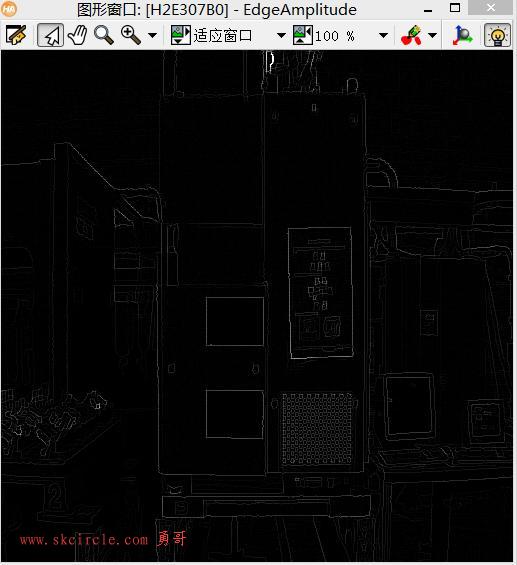
sobel_amp (Image, EdgeAmplitude, 'thin_sum_abs', 3)
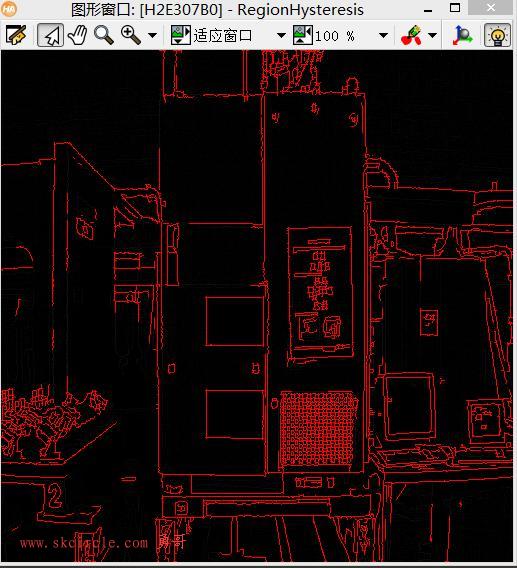
hysteresis_threshold (EdgeAmplitude, RegionHysteresis, 10, 20, 10)下面依次是: 原图、sobel_amp找边缘的图像。

这是hysteresis_threshold算子的结果。
原型
hysteresis_threshold(Image : RegionHysteresis : Low, High, MaxLength : )
功能
对图像执行滞后阈值操作(这个概念有点烧脑,后面会继续解释)
参数列表
Image (input_object) :输入图像
RegionHysteresis (output_object) :滞后阈值操作分割后Region
Low (input_control) :设置的低阈值
High (input_control) :设置的高阈值
MaxLength (input_control) :官方解释:Maximum length of a path of “potential” points to reach a “secure” point.字面翻译:“安全”点和“潜在”点路径的最大长度。
勇哥来白话一下参数的意义:
图像上灰度值大于或等于High的点有效,这样的点被称为“secure points安全点,灰度值小于Low的点无效,
灰度值在Low和High之间的点如果到“secure points的距离小于MaxLength则为有效。
未完待续…………
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")
:QWidget,QMainWindow")




Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





