 少有人走的路
少有人走的路halcon相机标定完成后,世界坐标系原点在标定板的中间,如果要自定义坐标系原点该如何操作
如图: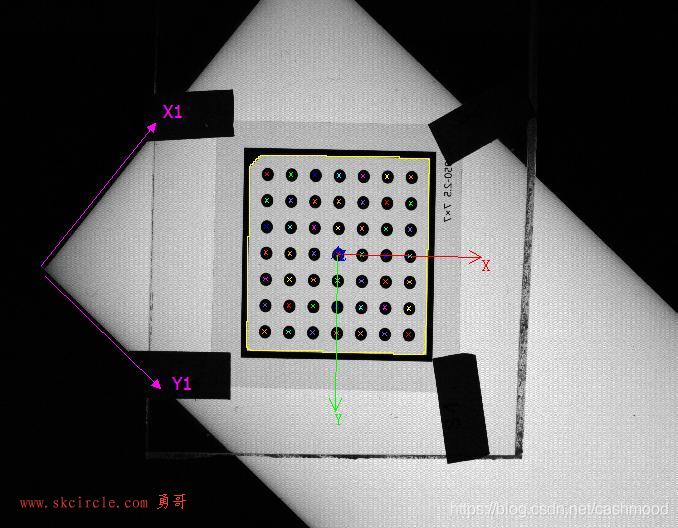
方法1
使用仿射变换
*pose_to_hom_mat3d (FinalPose, HomMat3D)
*hom_mat3d_translate_local (HomMat3D, dx, dy, 0, HomMat3DTranslate)
*hom_mat3d_rotate_local (HomMat3DTranslate, rad(da), ‘z’, HomMat3DAdapted)
*hom_mat3d_to_pose (HomMat3DAdapted, PoseAdapted)
方法2
使用设置位置与角度
*tuple_replace (FinalPose, 5, PoseCalib[5]+da, NewPose)
*set_origin_pose (NewPose, dx, dy, 0, PoseAdapted)
转载自:
https://blog.csdn.net/cashmood/article/details/102522484
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")
:运行时api的说明")




Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





