 少有人走的路
少有人走的路引言:
C#
勇哥注:所谓的3d相机标定并不是指的3d相机的标定,而是指的是3d空间做相机的标定,这个相机仍然是2D相机。 halcon的这套标定方法,同时可以应对测量、手眼标定。 并且由于是在3d空间做标定,因此你在做测量的时候相机和拍摄平面可以不是完全垂直, 或者物料可以任意方向倾斜(当然你的相机的景深要能做得到)。 如果你是做机器人手眼标定,这套标定方法无论是hand to eye,还是eye in hand,都可以搞定。 另外,你是四轴scara机器人还是串联的6轴机器人都可以的。 对于轴动的标定,也是没有问题的。 halcon的标定方法还可以实现相机标定和确定工作平面位姿进行分离。 这意味着你标定完相机后,你的测量平面可以随时改换。 halcon的这套3d相机标定方法不是一般的强,可以搞定现在工业机器视觉的绝大部分标定方面的应用。 至少勇哥还没发现有啥子应用它还做不到的。
实际物料的测量
接下来我们不用标定板做测试,我们测量实际的对象。
*如果没标定先进行标定
*calib()
*磁盘载入标定结果
read_calib_data('D:/交流群的问题/skcircle1589_3d相机标定(三)/calib.ccd', CalibDataID)
*进行标定
calibrate_cameras(CalibDataID, Error)
*取得相机内参
get_calib_data (CalibDataID, 'camera', 0, 'params', CameraParameters)
stop ()
* open_framegrabber ('GigEVision2', 0, 0, 0, 0, 0, 0, 'progressive', \
-1, 'default', -1, 'false', 'default', '94aab8029638_Microvision_MVEM500M', 0, -1, AcqHandle)
* grab_image(Image, AcqHandle)
* write_image(Image, 'tiff', 0, 'D:/交流群的问题/skcircle1590_3d相机标定(四)/w2.tif')
* close_framegrabber (AcqHandle)
*read_image (Image, 'D:/交流群的问题/skcircle1590_3d相机标定(四)/img1.tif')
*grab_image(Image, AcqHandle)
dev_get_window(WindowHandle)
*write_image(Image, 'tiff', 0, 'D:/交流群的问题/skcircle1589_3d相机标定(三)/img4.tif')
* TmpCtrl_PlateDescription := 'E:/Program Files/MVTec/HALCON-19.11-Progress/calib/calplateHG30.cpd'
* TmpCtrl_FindCalObjParNames := 'sigma'
* TmpCtrl_FindCalObjParValues := 1
*取当前标定板的位姿
* create_calib_data ('calibration_object', 1, 1, CalibHandle)
* set_calib_data_cam_param (CalibHandle, 0, [], CameraParameters)
* set_calib_data_calib_object (CalibHandle, 0, TmpCtrl_PlateDescription)
* find_calib_object (Image, CalibHandle, 0, 0, 0, TmpCtrl_FindCalObjParNames, TmpCtrl_FindCalObjParValues)
* get_calib_data_observ_points (CalibHandle, 0, 0, 0, TmpCtrl_MarkRows, TmpCtrl_MarkColumns, TmpCtrl_Ind, CameraPose)
*设置原点位置
* set_origin_pose (CameraPose, 0.0, 0.0,0, CameraPose)
* write_pose(CameraPose, 'campose.dat')
read_pose('campose.dat', CameraPose)
read_image (Image, 'D:/交流群的问题/skcircle1590_3d相机标定(四)/w1.tif')
startInx:=0
endInx:=13
dev_display(Image)
dev_set_draw('margin')
*测量宽度
AmplitudeThreshold := 24
RoiWidthLen2 := 5
set_system ('int_zooming', 'true')
LineRowStart_Measure_01_0 := 540.467
LineColumnStart_Measure_01_0 := 146.757
LineRowEnd_Measure_01_0 := 589.311
LineColumnEnd_Measure_01_0 := 1205.53
TmpCtrl_Row := 0.5*(LineRowStart_Measure_01_0+LineRowEnd_Measure_01_0)
TmpCtrl_Column := 0.5*(LineColumnStart_Measure_01_0+LineColumnEnd_Measure_01_0)
TmpCtrl_Dr := LineRowStart_Measure_01_0-LineRowEnd_Measure_01_0
TmpCtrl_Dc := LineColumnEnd_Measure_01_0-LineColumnStart_Measure_01_0
TmpCtrl_Phi := atan2(TmpCtrl_Dr, TmpCtrl_Dc)
TmpCtrl_Len1 := 0.5*sqrt(TmpCtrl_Dr*TmpCtrl_Dr + TmpCtrl_Dc*TmpCtrl_Dc)
TmpCtrl_Len2 := RoiWidthLen2
gen_measure_rectangle2 (TmpCtrl_Row, TmpCtrl_Column, TmpCtrl_Phi, TmpCtrl_Len1,\
TmpCtrl_Len2, 2592, 1944, 'nearest_neighbor', MsrHandle_Measure_01_0)
copy_obj (Image, Image, 1, 1)
measure_pos (Image, MsrHandle_Measure_01_0, 1, AmplitudeThreshold, 'all', 'all', \
Row_Measure_01_0, Column_Measure_01_0, Amplitude_Measure_01_0, Distance_Measure_01_0)
image_points_to_world_plane(CameraParameters, CameraPose, \
Row_Measure_01_0,Column_Measure_01_0, 'mm', rows, cols)
distance_pp(rows[0],cols[0],rows[1],cols[1], d2)
distance_pp(rows[2],cols[2],rows[3],cols[3], d2_5)
distance_pp(rows[4],cols[4],rows[5],cols[5], d3)
distance_pp(rows[6],cols[6],rows[7],cols[7], d3_5)
distance_pp(rows[8],cols[8],rows[9],cols[9], d4)
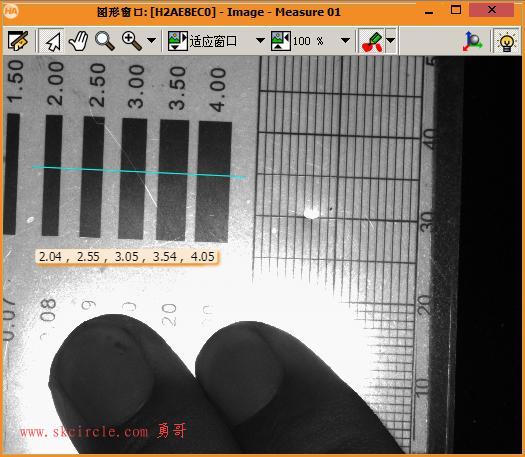
msg:=d2+' , '+d2_5+' , '+d3+' , '+d3_5+' , '+d4
disp_message(WindowHandle, msg, CameraParameters, 943,162, 'black', [])
stop ()上一篇已经取得一片标定板的姿式,可以用
write_pose(CameraPose, 'campose.dat') 保存下来。
这节课直接读取就行了:
read_pose('campose.dat', CameraPose)由于测量平面是标定板的表面,所以勇哥在标定板上直接铺上白纸,放上测试胶片。
然后就是measure_pos算子测量结果。它的“距离”结果是像素值,我们不能直接用。
我们要用它的Row_Measure_01_0, Column_Measure_01_0,用image_points_to_world_plane转世界坐标。
再人工用算子distance_pp计算两点间的距离,这个时候计算的就是世界坐标的距离了。
由于边缘像素的原因,结果不是太准。有4,5个丝的误差。
哪天我们的测量平面要改变高度或者倾斜角度,该怎么做?
相信大家已经很清楚了吧!
其它参考资料:
(halcon实例)测量透视畸变图像上的划痕的长度
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:


")
")
常用的6种方法")
 封装运动功能")


")











