 少有人走的路
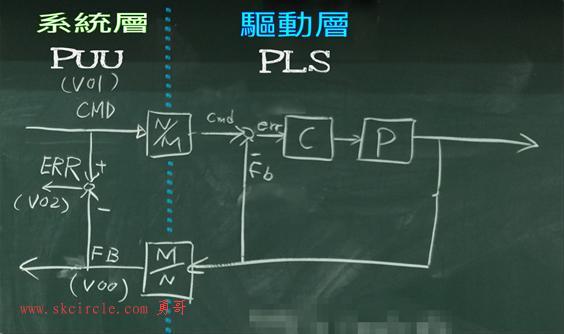
少有人走的路在运动控制系统中,包含许多位置计数器,来记录机械当时的位置,命令与误差。以 PLS 做为单位并不适合,(原因请参考 连结)。因此必须引入新的位置单位 ,称为 使用者单位PUU(Pos of User Unit) ,在传统以脉冲作为位置命令的系统称为 脉冲当量,表示一个脉冲对应的移动距离,由于目前控制系统可通过通讯发送命令,没有实体脉冲,使用者可更加自由的设定想要的位置单位,称为 使用者单位 PUU。 PUU 与 PLS 的关係即为电子齿轮比(N/M),如下所示:
PUU(数目/每转) * N/M (电子齿轮比 分子/分母)= PLS(数目/每转)
PUU 使用者单位说明
电子齿轮比左侧,属于控制系统,採用PUU单位。齿轮比右侧,属于驱动器内部,採用PLS单位[注1]。两侧都各有位置回授(FB),命令(CMD)与误差(ERR)。且满足 ERR = CMD – FB。
[注1],藉由提升编码器的解析度(目前已达 23 bit/Rev),可让位置分辨率与低转速的速度估测更精确。 驱动器的目标是让马达控制的性能最佳,自然是直接以PLS单位来处理为佳!
使用PUU单位的主要优点:
1,方便观察
PUU 代表的单位是由使用者所定义,自然可以选择常用且易于观察的单位。例如公制单位 m 或角度。
直线运动的机构,PUU通常定义成 10um 或 1um 或 0.1 um。 旋转运动的机构,通常机构一週定义成 360000个PUU 或再补若干个0,让PUU等于0.001度或更细。 也可以定义旋转一週为 100000PUU,如此一个PUU即表示 1/100000 圈。
如此PUU就是常用单位的千分之一或万分之一,很容易由PUU直接理解机构实际的位置。
2,单位统一
在控制系统中往往不只一个马达,每个马达连接的机械结构尺寸各异,马达型号或编码器解析度也许不同,各轴转一圈对应的机械位移量就会不同,使每个轴的PLS单位不同。运动控制器在做路径规划时各轴的位置单位必须要统一才会方便!使用PUU 便可以满足此要求。
由于 编码器解析度通常很高(例如 20 bit/rev),PLS单位太细,因此电子齿轮比通常会远大于1,来降低PUU 的解析度。这样可以让 控制系统的位置计数器 比较不容易溢位。但也要注意 电子齿轮比太大的时候,会造成马达运转命令不够平滑,尤其是低转速下的抖动会很明显,甚至有走走停停的现象。一般建议 马达一转对应的 PUU 数目 宜在 5000 PUU/rev 以上为佳!
若以台达A2伺服马达为例,PLS单位是 1280000 PLS/rev,则电子齿轮比设定的最大值应为?
因为 PUU数目/rev = 1280000 PLS/rev * M/N (电子齿轮比 倒数)> 5000 (PUU/rev) 所以 电子齿轮比 N/M < 1280000/5000 电子齿轮比 N/M < 256
PUU 与齿轮比的优先顺序:
由以上分析得知,PUU 是根据我们的喜好或需求选定的,所以应该是先决定 PUU 单位,然后再算出对应的齿轮比!这个顺序不应该颠倒,毕竟伺服是为人们提供服务的,不该让使用者被动的接受奇怪的 PUU单位!计算 齿轮比的方法 可以参考:由机构末端反推电子齿轮比.



")
")
常用的6种方法")
 封装运动功能")
")













