 少有人走的路
少有人走的路编码器分辩率
23位编码器的分辨率为8388608
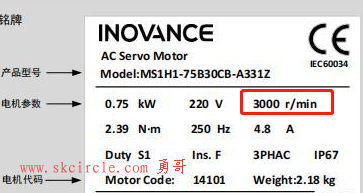
电机的额定转速
看电机铭牌,伺服电机一般是3000转额定转速
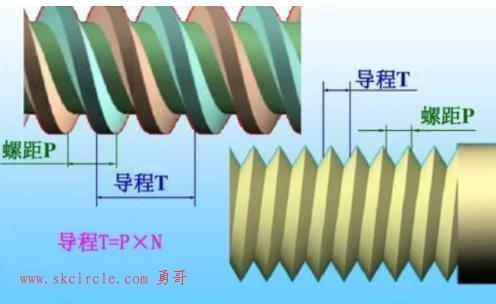
丝杆螺距/导程
丝杆转一圈的距离既看螺距又看导程,对于单头丝杆来说,螺距和导程在数值上是一样的;
对于多头螺纹来说,导程等于螺距乘头数
丝杆导程和精度
。导程和负载的速度、伺服电机的最大转速和脉冲当量都是相关
。导程越大,速度越快,但是负载就变小
。丝杆有精度概念,例如C3级别进行精度为0.008mm
。在速度满足的情况下,要选择小的导程,有利于提高控制精度
每转脉冲数
伺服电机的每转脉冲数需要根据编码器的分辨率来计算。
例如,一个电机内置分辨率为8388608的编码器,每转所需脉冲数就为8388608。
当控制信号输出1个脉冲时,电机就会旋转0.0000429个角度(360度除以8388608)
PUU
使用者单位(Pos of User Unit)
直线运动的机构,PUU通常定义成 0.01mm 或 0.001mm 或 0.0001 um。
确定了PUU后,再设置电子齿轮
伺服电子齿轮/伺服的每转脉冲数
伺服的每转脉冲数=导程/puu
伺服电子齿轮= (编码器分辨率*机械减速比分子)/(导程/puu*机械减速比分母)
伺服的脉冲当量
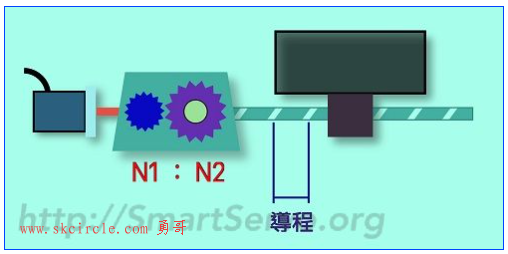
减速比
=伺服的转数/丝杠的转数;
工件平移的距离
=导程×丝杠的转数;
=导程×伺服的转数/减速比
伺服的转数
=伺服输入的驱动脉冲/伺服每圈脉冲数;
电机额定最大接受的脉冲数
= (电机额定转速/60)*编码器分辨率
伺服电机理论的最大速度(mm/s)
s=h/t (速度=距离/时间)
=(丝杆导程*电机额定转速)/60
运动卡速度为x脉冲/s,那么速度是多少mm/s
=(运动卡速度/编码器分辨率)*丝杆导程
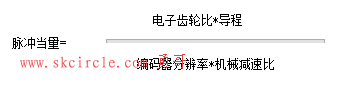
伺服电机的脉冲当量
=(电子齿轮比*导程)/(机械减速比×编码器分辨率)
步进电机步距角
步进电机的步距角是电机技术中的一个重要参数,它指的是电机每次转动一步时所改变的角度。
步距角具体的定义如下:
两相步进电机步距角是1.8°。
三相步进电机步距角是1.2°。
三相六拍驱动方式运行的步进电机的步距角是0.6°。
四相步进电机四拍运行时步距角是1.8°,八拍运行时步距角是0.9°。
步进电机脉冲数
1。首先假设丝杠导程是5mm。
2。假设电机的步距角是1.8度,那么转一圈就是200步,圆为200×1.8=360度。
3。驱动器是8个细分,也就是说,1.8步距角为8个细分。
4。所以电机通过驱动器的每一步都是1.8度的1/8=0.225度。
5。所以每转200×8=1600步。
6。导程5的丝杠每圈移动5mm,每步移动5mm/1600=0.003125 mm
步进电机的脉冲当量
=(步距角*导程)/(机械减速比×编码器分辨率*360)
低速差分
高速差分
双脉冲



")
")
常用的6种方法")
 封装运动功能")
")
:随机对象源,用于生成随机摆放的物料")











