 少有人走的路
少有人走的路(一)补偿技术
摩擦力补偿
通过附加力矩的方式补偿实际存在的摩擦力矩,基于Stribeck理论对伺服电机实施速度关联的前馈电流控制
温度补偿
提供了根据当前温度和轴位置来纠正轴命令变量的功能
间隙补偿
用于补偿由于机械间隙引起的轴的实际位置与计算的实际位置之间的偏差
平面补偿
关键轴的对准可以作为两个主轴位置的函数来补偿。例如,根据X和Y同时对Z轴进行补偿
交叉补偿
允许补偿矩形误差或由于轴的变形而产生的误差
运动控制中的平面补偿
FANUC反向间隙补偿原理及方法
https://baijiahao.baidu.com/s?id=1656904873136843157&wfr=spider&for=pc
数控机床长时间使用后反向间隙的测量和补偿
https://zhuanlan.zhihu.com/p/592590292
(二)机器程序与运动控制交互带宽
即用户运动程序和运动部件的交互速度。
网口通讯的运动控制器>500us
pci接口的运动卡约 70us左右
超高速度运动卡约 6us左右
软卡(占用一个cpu核,有自己的实时层)使用共享内存方式,低于0.06us
因此软卡在用户程序与卡的交互速度上,比其它方式的运动部件快几个数量级。
(三)振动抑制
观察一根轴在运动时的震动,最简单的办法就是在轴上面固定一个弹簧。
你会观察到在启动与停止的时候,弹簧有明显的晃动。
振动抑制如果做的优秀,可以极大减弱弹簧的这种明显晃动。
或者在这个轴上放一杯水,可以观察到无论它的运动快慢,水都不会洒出来。
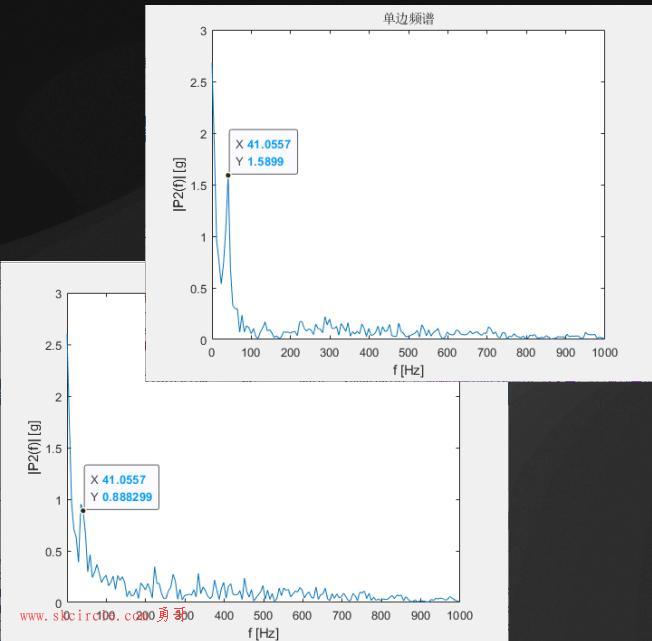
运动控制中的振动抑制
(四)样条路径
样条路径是指,使用 CAD等软件的样条工具的图形导入,可以直接按样条轨迹运动。
软件卡或者硬卡可以直接使用样条进行轨迹运动,或者也可能是需要导入后进行解析出运动点然后做连续运动,大部分样条功能都是使用后者(例如像雷塞的5000系列卡,就有此功能。)。
后者实际上是按解析后的若干个控制点来进行前瞻速度和路径规划,并能够基于用户设定的允许误差进行路径规划,设定较柔软的动力学参数以减少机械振动。



")
")
常用的6种方法")
 封装运动功能")
:功能介绍")














