 少有人走的路
少有人走的路勇哥注:
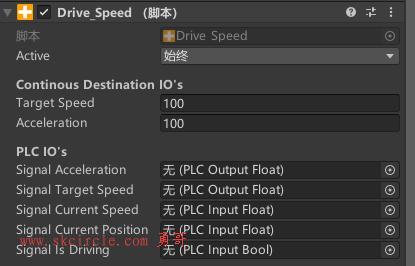
Drive_Speed就是以恒定的速度持续运动。
如果想停止,需要把Target Speed改为0。
如果想改变运动方向,需要把Target Speed改为负值。
Drive_Speed运动方式,就是我们调机时用的jog运动。
在触摸屏上,jog运动的按钮按住不放就持续运动,松开就停止。
jog运动适合轴位置的粗调,然后精调就是使用ptp运动了。
下面是Drive_Speed运动的参数。
由于比较简单,勇哥没什么好解释了。
勇哥注:
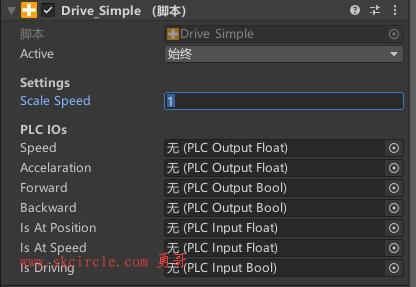
Drive_Simple就是用bool量控制电机的启停。
这个其实就是IO启停的电机控制,比如拉带电机。
通过Drive_Simple的参数面板,可以看到这个运动方式可以指定:
Speed, Accelaration 速度,加速度
Forward, Backward 向前动,向后动
然后就是运动状态的反馈等。
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:


")
")
常用的6种方法")
 封装运动功能")
")














