 少有人走的路
少有人走的路勇哥注:
这节研究一下仿真序列的并行动作。
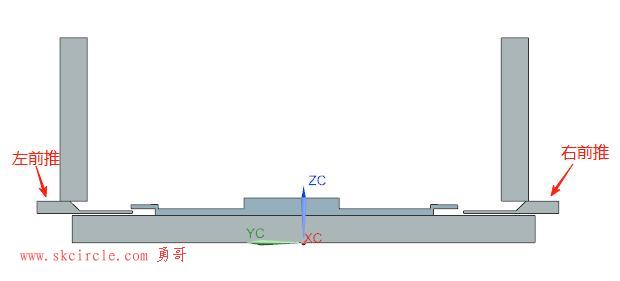
(一)时间序列的并行
这种比较简单。
因为起始时间一样,所以“左前推”和“右前推”两个气缸的动作是并行的。

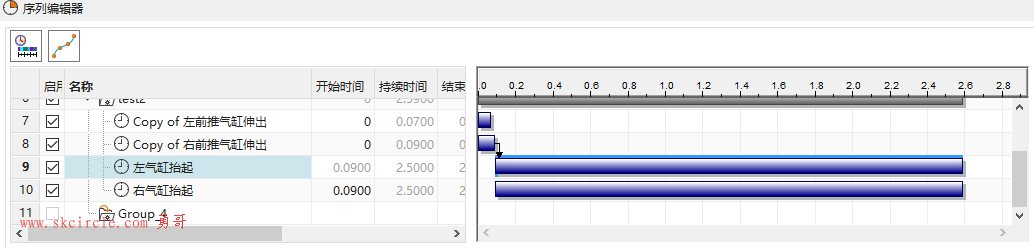
(二)同时夹,同时抬起
但是还是有个问题,它是基于时间的并行。
当你仿真后到了时间就会执行。
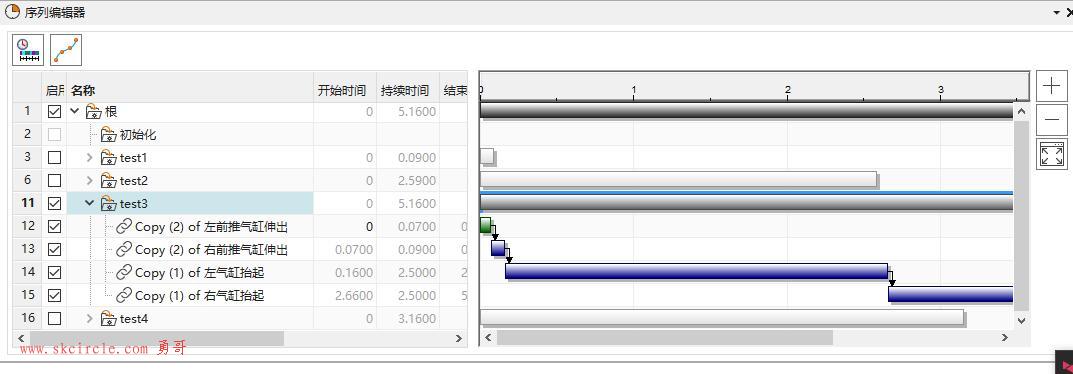
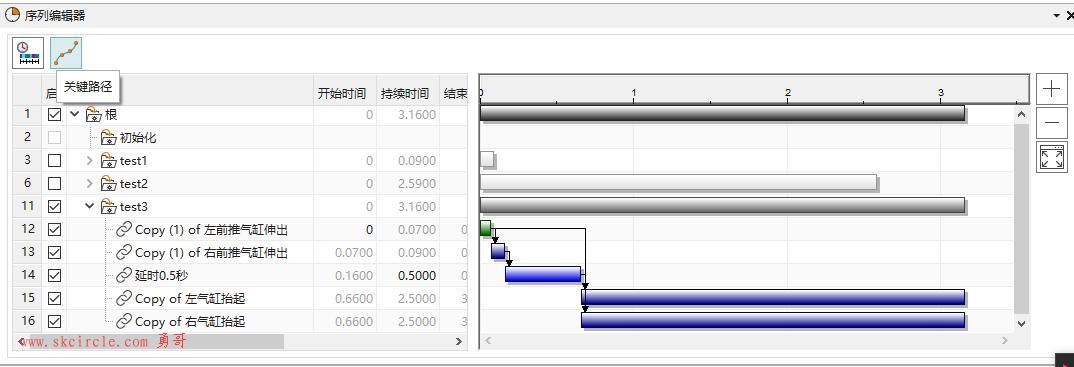
(三)事件和链接模式
第12步是事件模式(注意它的甘特图是绿色的)
接下来3步都是链接模式。
这种方式以事件开始,然后是依次顺序执行。有了严格的先后次序。
由于所有步都不是基于时间的,而是依靠链接顺序的,所以仿真运行后,只能事件触发后所有步才会依次执行。
但是这种方式没有做到并行。
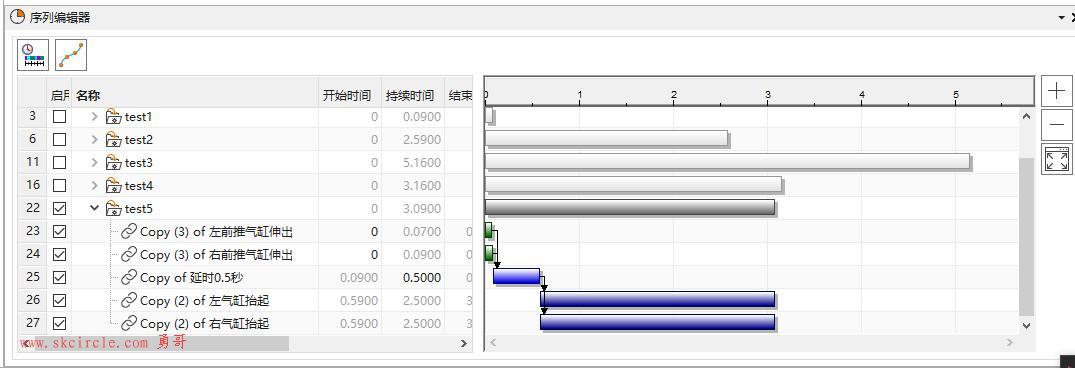
(四)事件+链接模式,并且有先后次序和并行效果
这种方式有(三)的特点,而且最重要的是多了并行效果。
但是有个问题,就是籎13步和第12步之间还是串行关系(如果不这样做,那么第13步就是基于时间的)
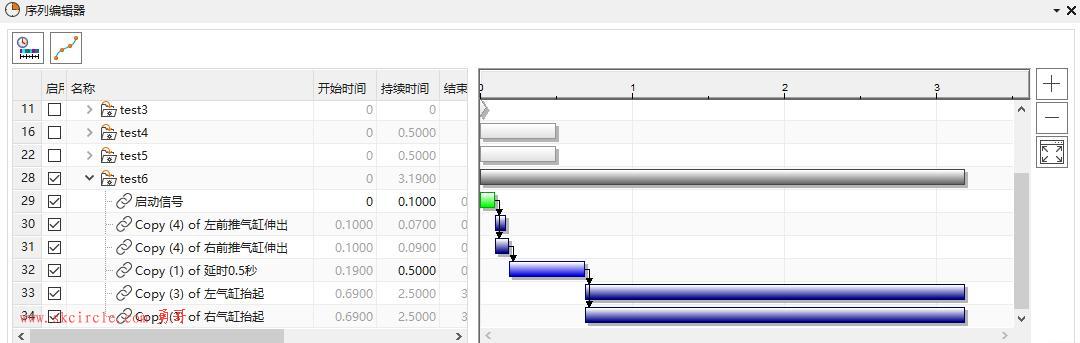
(五)改进后的最终效果
把第24步也变成事件的。这样就解决了(四)的问题。
(六)改进后的效果2
只使用一个事件序列做为总的启动信号。
这应该是勇哥能想到的最完美的解决方案。
下面是动图演示操作过程:
2025.8.9勇哥注:
scara机器人做反解时,我发现系统生成的仿真序列如下所示:
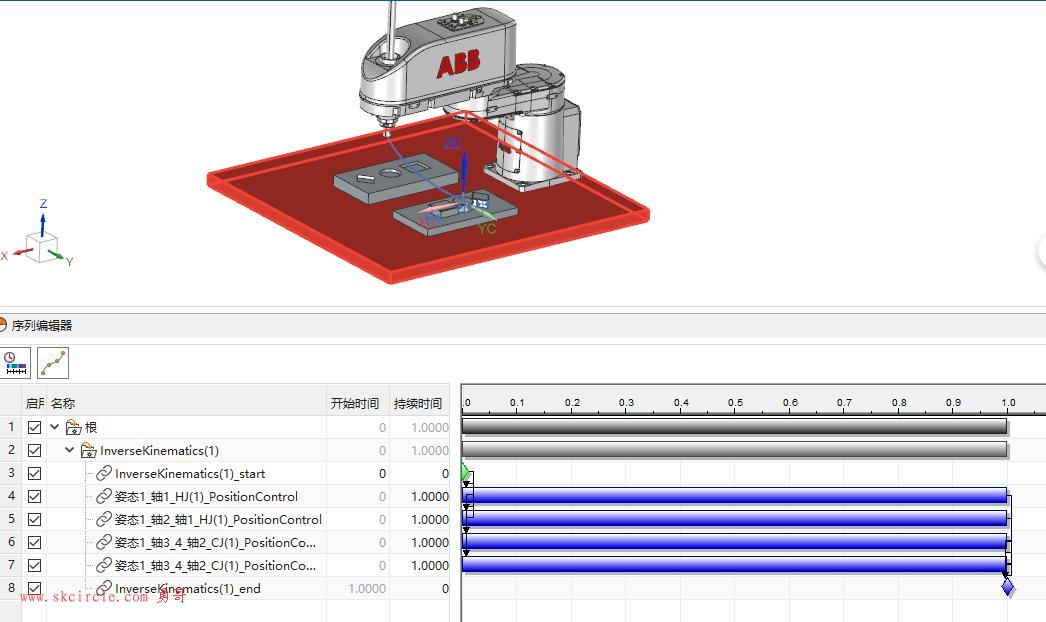
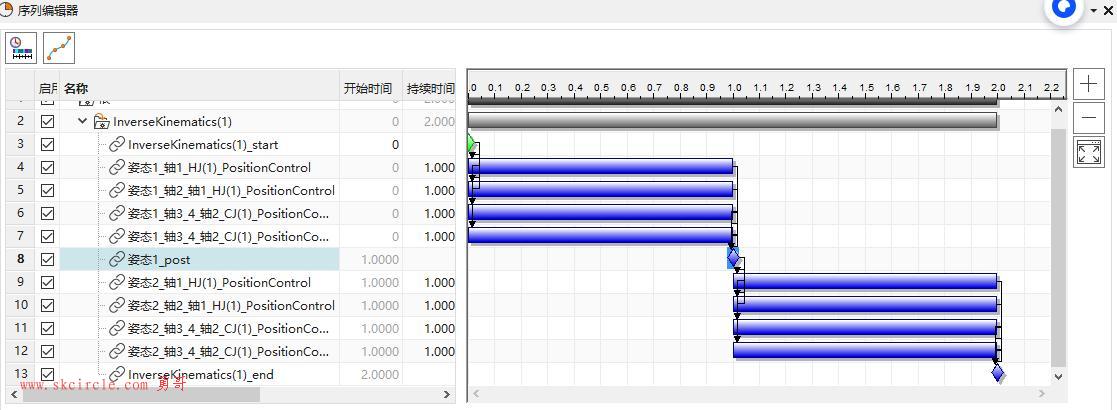
可以看到,它是一组与另一组做衔接的方式。
他是怎么弄的呢?
看下面勇哥的演示:
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:

本帖最后由 勇哥,很想停止 于 2025-08-07 21:45:50 编辑 
")
")
常用的6种方法")
 封装运动功能")


")
")

Qt Widgets Designer界面设计器和界面应用")
:与C#不同点,鸭子类型,多线程,多进程编程,访问控制,事件委托实现,lambda表达式,常用内置库,为啥说python简单易用?")
:有无数组?字符串方法,读写文件,序列化,配置文件,异常处理,循环和选择,模块与包,调试手段")
:枚举,装饰器,self,类的三种类型,特殊方法,oop,代码格式,方法 ,方法返回类型,识别函数返回类型")





