 少有人走的路
少有人走的路1:自定义机械手工具的编程
Function CalcTool(rx As Real, ry As Real, iToolNum As Integer)
'重新生成新的工件坐标
Real xTool, yTool, rTool, theta
Real x0, y0, u0
Tool 0
x0 = CX(Here) ‘当前位置的Tool 0 X坐标
y0 = CY(Here) ‘当前位置的Tool 0 X坐标
u0 = CU(Here) ‘当前位置的Tool 0 X坐标
xTool = rx - x0
yTool = ry - y0
theta = Atan2(xTool, yTool)
theta = theta - DegToRad(u0)
rTool = Sqr(xTool * xTool + yTool * yTool)
xTool = Cos(theta) * rTool
YTool = Sin(theta) * rTool
TLSet iToolNum, XY(xTool, yTool, 0, 0)
Fend
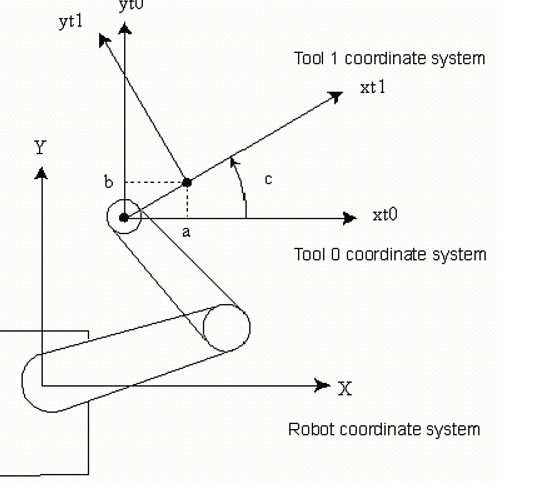
2图示
需要计算机械手旋转为0时的,工具与默认工具坐标的X,Y坐标偏移
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")
")


:安装模块,验证模块是否正常,一个简单的gui测试")



Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





