 少有人走的路
少有人走的路接上一篇《Epson机器人标定后验证标定的精度(三)》
我们继续做实验。
这一次我们不用现有的示教点做tool0到tool1的转换对比,而采用指定一个点(目标像素点),转为机械坐标后再运动过去,再对比特征点的位置。
标定特征点信息 像素x:690.251 像素y:458.546 机械x:278.650031470315 机械y:-13.713127158548 要移动到点的位置(红点处)为:685,451
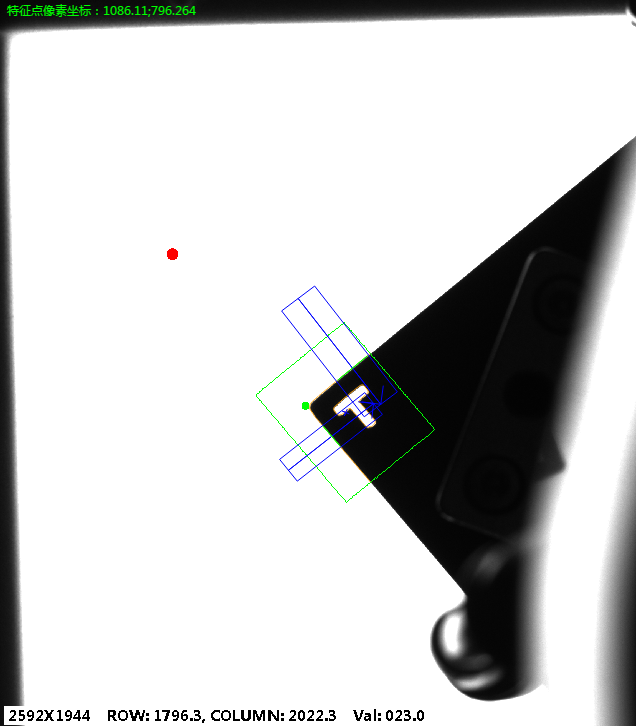
(图1 当前的特征点)
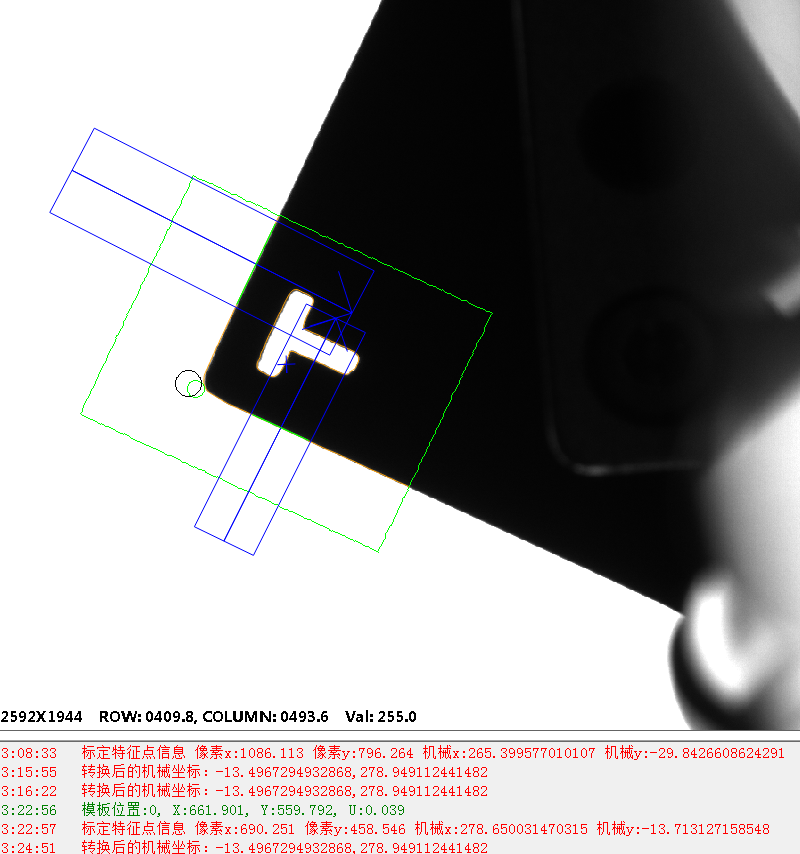
(图2 移动到指定后)
要移动到点的位置(红点处)为:685,451 转换后的机械坐标:-13.4967294932868,278.949112441482
我们对比移动到后的像素坐标:
目标为: 685, 451
实际为: 690.251, 458.546
row差5.2个像素
column差 7.5个像素
对比机械坐标:
到目标位置后的机械x:278.650031470315 机械y:-13.713127158548
由像素坐标685,451直接转换后的机械坐标:278.949112441482,-13.4967294932868
x相差:0.3mm
y相差: 0.22mm
差一口气没走到位置,在图2可以清楚看到位置的差别。
这个结果可不怎么样,是什么原因呢?
我们知道如果工具坐标没有做好的话,机械人沿工具坐标中心旋转时圆心位置会有偏差。
会是这个原因吗?
先用旋转的方式验证一下工具坐标准不准。
由于标定最后一张图片是在ct1点,所以我们让机器人回到tool 0下的ct1点位置。
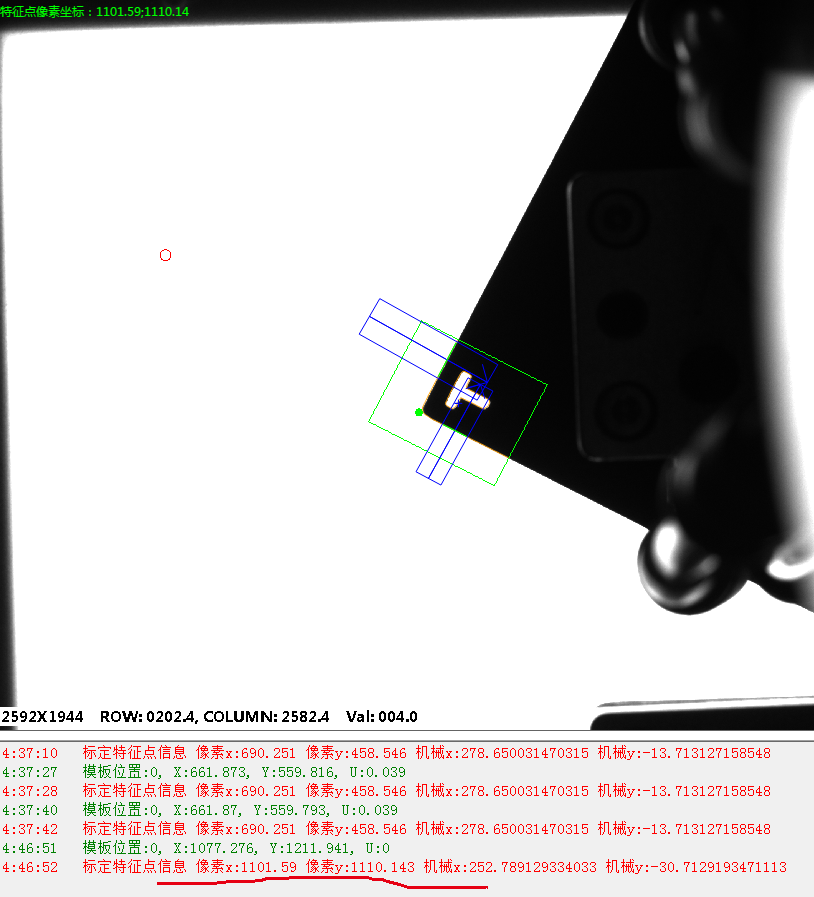
(图3 ct1位置的特征点)
在图3中,ct1位置的特征点就是tool 1的中心。 像素坐标是: 1101.59, 1110.143。 机械坐标是:252.789, -30.712
我们旋转这个中心,理论上无论转多大角度,像素坐标是不会变的。如果变化很大则表示工具坐标 tool 1创建不准。
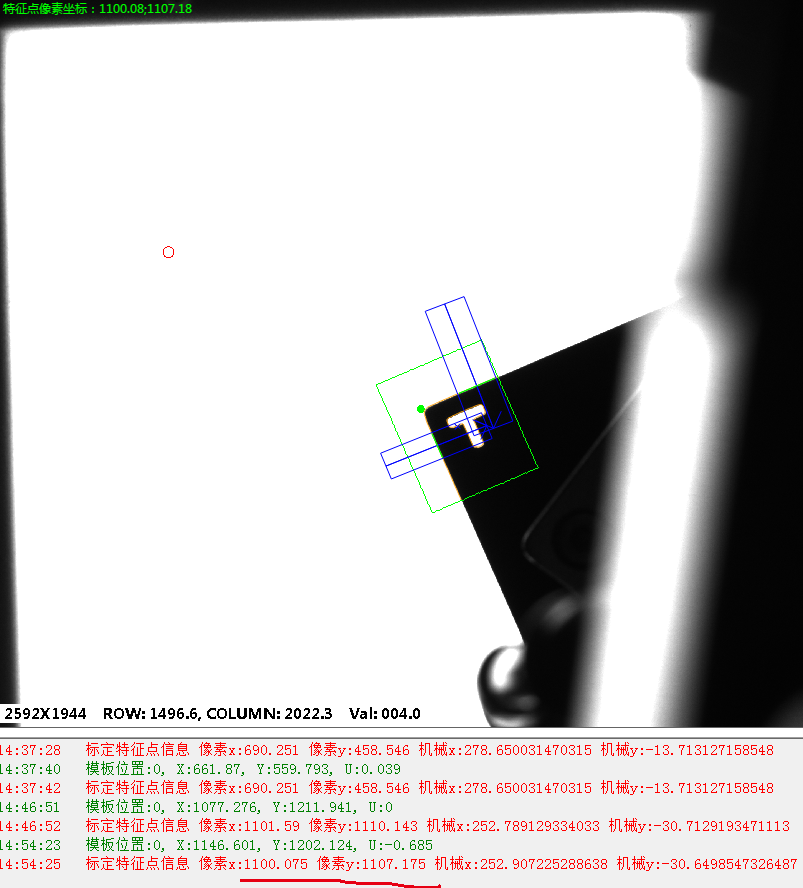
(图4)
图4是我们顺时针转了40度后的特征点图片,相比上一次的像素坐标1101.59, 1110.143, x变化了1.5像素, y变化3个像素。
机械坐标之前是:252.789, -30.712 现在是 252.907, -30.649 x变化: -0.06mm, y变化:0.12mm, (注意:提示中机械X,Y信息写反了)
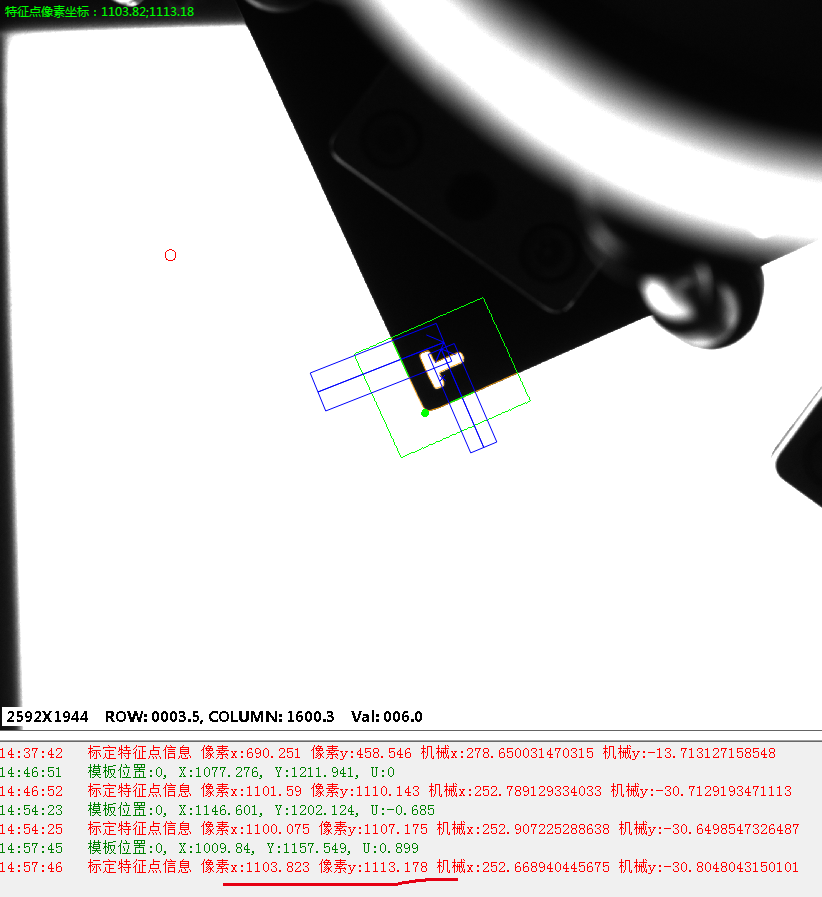
(图5)
我们再由ct1的起始位置逆时针转50度,如图5所示。
相比上一次的像素坐标1101.59, 1110.143, x变化了2.2像素, y变化3个像素
机械坐标之前是:252.789, -30.712 现在是 252.668, -30.804 , y变化0.12mm, x变0.09mm
可以看到结果还是不错的
这下勇哥又不知道怎么解释了,我现在想人工做一个工具坐标,试试结果如何?
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")
")






Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





