 少有人走的路
少有人走的路卷积
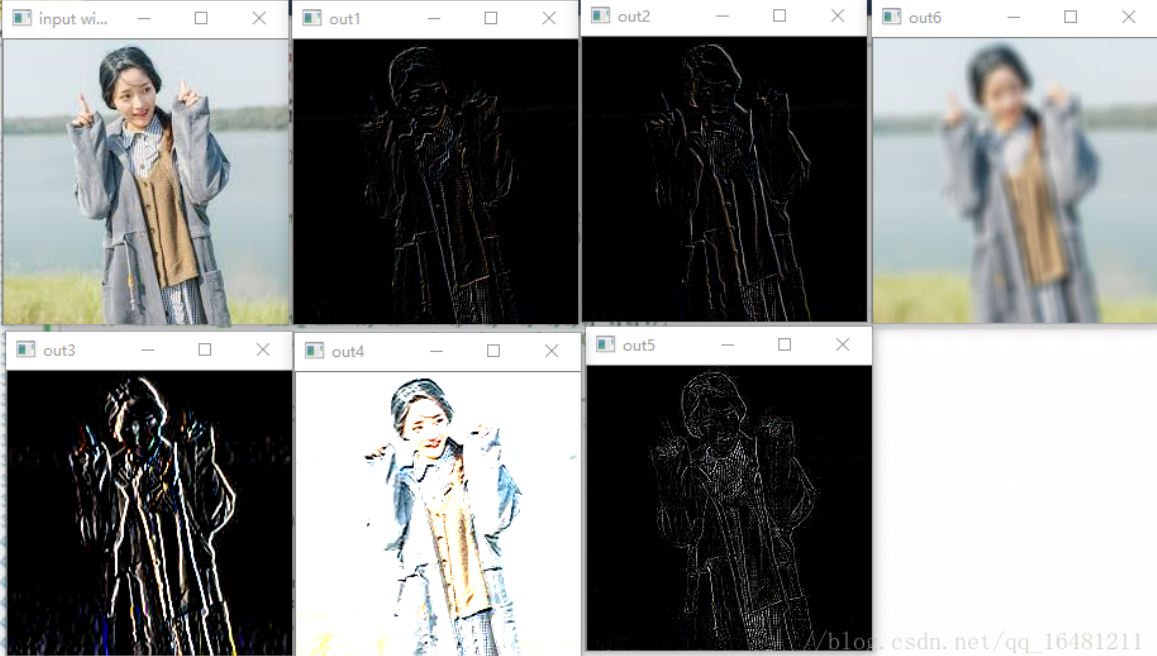
模糊图像,图像边缘,增强图像
常见卷积算子:
Robert、sobel、拉普拉斯算子
代码:
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
using namespace cv;
int main(int argc,char ** argv)
{
Mat src,dst;
Mat kernel;
char outwindow1[] = "out1";
char outwindow2[] = "out2";
char outwindow3[] = "out3";
char outwindow4[] = "out4";
char outwindow5[] = "out5";
char outwindow6[] = "out6";
src = imread("1.jpg");
namedWindow("input window",CV_WINDOW_AUTOSIZE);
imshow("input window",src);
namedWindow(outwindow1,CV_WINDOW_AUTOSIZE);
namedWindow(outwindow2,CV_WINDOW_AUTOSIZE);
namedWindow(outwindow3,CV_WINDOW_AUTOSIZE);
namedWindow(outwindow4,CV_WINDOW_AUTOSIZE);
namedWindow(outwindow5,CV_WINDOW_AUTOSIZE);
namedWindow(outwindow6,CV_WINDOW_AUTOSIZE);
Mat kernel_x = (Mat_<int>(2,2)<<1,0,0,-1);
filter2D(src,dst,-1,kernel_x,Point(-1,-1),0.0);
imshow(outwindow1,dst);
Mat kernel_y = (Mat_<int>(2,2)<<0,1,-1,0);
filter2D(src,dst,-1,kernel_y,Point(-1,-1),0.0);
imshow(outwindow2,dst);
//左右的差异
Mat kernel2_x = (Mat_<int>(3,3)<<-1,0,1,-2,0,2,-1,0,1);
filter2D(src,dst,-1,kernel2_x,Point(-1,-1),0.0);
imshow(outwindow3,dst);
//上下差异
Mat kernel2_y = (Mat_<int>(3,3)<<-1,-2,1,0,0,0,1,2,1);
filter2D(src,dst,-1,kernel2_y,Point(-1,-1),0.0);
imshow(outwindow4,dst);
//拉普拉斯算子
Mat kernel3 = (Mat_<int>(3,3)<<0,-1,0,-1,4,-1,0,-1,0);
filter2D(src,dst,-1,kernel3,Point(-1,-1),0.0);
imshow(outwindow5,dst);
int ksize = 0;
int c = 0;
int index = 0;
while(true)
{
c = waitKey(500);
if((char)c == 27)
{
break;
}
ksize = 4 + (index % 8) * 2 + 1;
Mat kernel_auto = Mat::ones(Size(ksize,ksize),CV_32F)/float(ksize*ksize);
filter2D(src,dst,-1,kernel_auto,Point(-1,-1),0.0);
index ++;
imshow(outwindow6,dst);
}
return 0;
}效果:
源码请到github下载:
https://github.com/MRwangmaomao/OpencvConvolution-Project.git
————————————————
版权声明:本文为CSDN博主「南山二毛」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_16481211/article/details/79605608
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")


Qt Widgets Designer界面设计器和界面应用")
:运行时api的说明")

:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





