 少有人走的路
少有人走的路勇哥继续讨论Epson机器人手眼标定的过程和一些经验。
(一)九点标定时的高度与实际电池取放高度相差几毫米可以吗?
依据最近勇哥现场做的实验来看,如果标定高度不等于电池取放高度,影响很大。
定位的时候差别按mm来算,不是差一点半点。
而且这种偏差呈放射状的变化,有点像CCD的成像方式。

勇哥画了个示意,在下图中,电池1的偏差可能是向左,而电池6的偏差可能是向右。
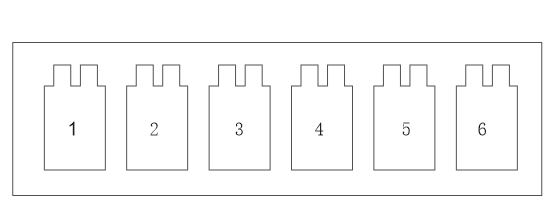
如果这个时候把电池面升高到原来标定的高度,你会发现机器人走位又非常准确了。
(二)一定要九点标定吗,不可以四点吗?九点标定一定需要九宫格子吗?
这个要看你是怎么标定的。
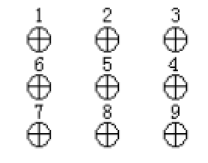
如果使用epson机器人自己的VxCalib指令来标定,你就需要九宫格子,而且对次序也有要求,请看下图:
但是,点的位置比较凌乱也是可以的,关键是那个次序对了就可以了,例如像下图这样也是可以的。
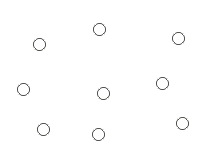
有时候,我们可以在料盘里面放上电池,直接在电池表面上贴标志圆,这时候虽然凌乱,也是可以正常标定的。
九点点的数量是不可以少,也不可以多的。
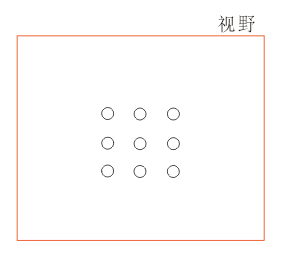
另外,你的九个点应该尽量充满视野范围内,像下图这样标是不可以的。
如果我们使用halcon来标定,则对点的数量没有特殊要求。
勇哥试过用九点和四点对比过,貌似差别并不大。
对点的次序貌似也没什么要求。
但是标定点要尽量充满视野范围内这个是必须的。
另外,无论什么方式标定,还要注意标定时用来戳九个点时机器人的姿势和角度请保证差不多,不要标定用左手戳九个点,走位时用右手去走。
(三)工具坐标一定要按工具向导中所说的第二个示教点转到刚好180度吗?
勇哥和Epson的技术人员再三确认过,利用工具向导创建工具坐标求,第二个示教点可以不用刚好等于180度,它即可以小于180度,也可以大于180度,都没有关系。
如果是小于180度,那么多大为好呢?这个就有点争议了,一般来说认为最好超过120度,也有说超过40度就可以。
因为有些时候因为机构的限制,我们还真不可能转太大的角度,因此我们可以放心转小于180度的角度。
(四)工具坐标怎么创建好?工具坐标的精度怎么验证?
创建工具坐标最常见的是给吸嘴装一个套,这个套安装于两个吸嘴的中间(如果只有一个吸嘴,那就是单个吸嘴的中间),套的下面有一个锥。勇哥画了一个示图如下:
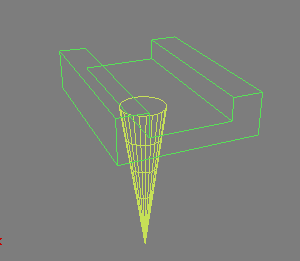
然后我们就可以在视野内找一个小圆孔,在创建工具坐标向导时,第一个示教点把锥戳到小圆孔里,第二个示教点把机器人转180度,再把锥戳到小圆孔里,完成工具坐标的创建。
创建好工具坐标后,我们把Z轴抬起一点,然后旋转U轴至一定角度,观察锥的中心是不是偏离了小圆点,如果是,那就可检查原因。
一般原因是因为:
机器人走XY不平行
机器人左右手走同一个点偏差很大
以上两点勇哥之前都讲解过解决办法。
(五)怎么判断机器人的原点没有问题?
通过验证指令: pulse 0,0,0,0 (所有轴用脉冲方式走到原点位置) 会让机器人各个轴都回到原点位置。然后观察各个轴的原点标志。
但是这种方式有个问题,就是通常不能这样回原点,因为机器的机构有干涉。
上次看到Epson的技术人员通过一些指令配合观察原点位置,可以判断原点是不是有问题。
勇哥当时没学会这招,待询问epson的技术人员。。。
(六)怎么判断左右手定位有偏差?
我们可以分别用左手与右手走同一个点位,观察锥的位置有没有较大的偏差,如果有,就能判定左右手有偏差。
上面问题四中谈到的验证工具坐标的精度时也可以发现这种问题。
(七)怎么验证九点标定的精度?
九点标定完成后,你可以直接用笔在标定纸上画上几个点,最好位置分散到视野最大范围。
然后CCD拍照,找到点的中心像素坐标,把它转为机器人坐标,走过去,用锥戳它。
然后可以把走位的角度变化大一些,然后把所有点再走一遍。
如果几个回合试下来,所有的点都准确则表示定位准确。
(八)怎么制作九点标定板?
用一张A4的普通纸张打印一份就可以了。注意不要使用使用碳粉的激光打印机,因为这种打印机会有加热碳粉的过程,纸张一加热就形变了。你应该使用喷墨打印机来打印。
最好使用矢量绘图软件CorelDraw来制作标定图。CAD里面因为勇哥不知道线宽怎么设置,所以就不推荐了。
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!



")
")
常用的6种方法")
 封装运动功能")
")
")

:运行时api的使用,vs环境下的联调")










