 少有人走的路
少有人走的路有些时候,CCD的安装角度的原因,造成机器人的方向与视野内CCD的方向不同。
图二的顺序符合机器人要求的九点标定的次序:
1,2,3,
4,5,6,
7,8,9
图一所示,因为CCD转了90度,因此其视觉x,y与机器人x,y是反的。
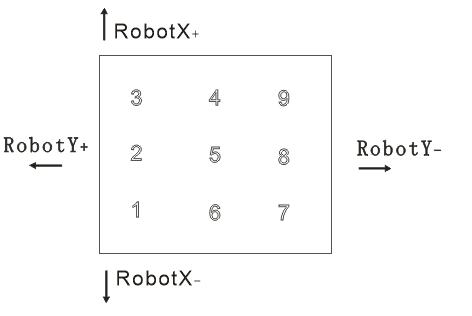
(图1)

(图2)
遇到这种情况,如果是调试阶段的机器,建议把CCD的角度转一下。
如果不想转CCD角度,我们要注意一点,最终的九点标定数据中,我们记得要把像素的x,y和机器人的x,y记录次序要保证一样即可。
例如图1我们出来的九点标定数据如下:
| ccd x | ccd y | robot x | robot y |
| 687.6 | 1541.1 | -258.094 | 265.682 |
| 697.7 | 929.3 | -235.297 | 266.032 |
| 706.7 | 334 | -212.736 | 266.463 |
| 1378 | 334.9 | -212.644 | 241.011 |
| 1369 | 941 | -235.098 | 241.015 |
| 1358.3 | 1552.5 | -257.983 | 240.665 |
| 1988 | 1563 | -257.949 | 217.249 |
| 1998 | 951.2 | -234.94 | 217.374 |
| 2007.8 | 355 | -212.506 | 217.48 |
这个表格上的数据有个问题就是像素坐标的x,y要换个位置,这样就可以和机器人的x,y对应上。
注意这一点就可以了。
而且,如果你数据记录是反的话,标定出来的结果会错得离谱。这一点也可以用来佐证你是不是数据没匹配好。
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:


")
")
常用的6种方法")
 封装运动功能")



")










