 少有人走的路
少有人走的路演示代码:
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
using namespace cv;
int main(int argc, char** argv) {
Mat src, dst,dst2,dst3,dst4,dst5,dst6;
src = imread("e:/5gray.bmp");
imshow("src image", src);
//Robert算子x方向
Mat kx = (Mat_<int>(2, 2) << 1, 0, 0, -1);
filter2D(src, dst, -1, kx, Point(-1, -1), 0.0);
//Rober算子y方向
Mat ky = (Mat_<int>(2, 2) << 0,1, -1, 0);
filter2D(src, dst2, -1, ky, Point(-1, -1), 0.0);
imshow("RobertX", dst);
imshow("RobertY", dst2);
//Sobel算子x方向
Mat kx2 = (Mat_<int>(3, 3) << -1,0,1,-2,0,2,-1,0,1);
filter2D(src, dst3, -1, kx2, Point(-1, -1), 0.0);
//Sobel算子y方向
Mat ky2 = (Mat_<int>(3, 3) << -1,-2,-1,0,0,0,1,2,1);
filter2D(src, dst4, -1, ky2, Point(-1, -1), 0.0);
imshow("SobelX", dst3);
imshow("SobelY", dst4);
//拉普拉斯算子
Mat ky3 = (Mat_<int>(3, 3) << 0,-1,0,-1,4,-1,0,-1,0);
filter2D(src, dst5, -1, ky3, Point(-1, -1), 0.0);
imshow("拉普拉斯", dst5);
//自定义算子
int c = 0;
int index = 0;
int ksize = 3;
while (true) {
c = waitKey(500);
if ((char)c == 27) { //ESC键
break;
}
ksize = 4 + (index % 5) * 2 + 1;
//Mat m = Mat::ones(2, 2, CV_8UC3); 相当于:Mat m = Mat(2, 2, CV_8UC3, 1);
Mat kernel = Mat::ones(Size(ksize, ksize), CV_32F) / (float)(ksize * ksize);
filter2D(src, dst6, - 1, kernel, Point(-1, -1));
index++;
imshow("custom", dst6);
}
waitKey(0);
return 0;
}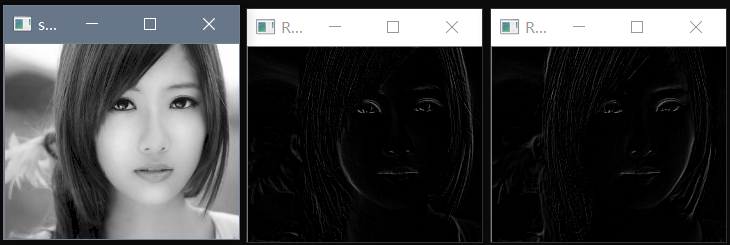
(分别为:原图、Robert X方向, Robert Y方向)
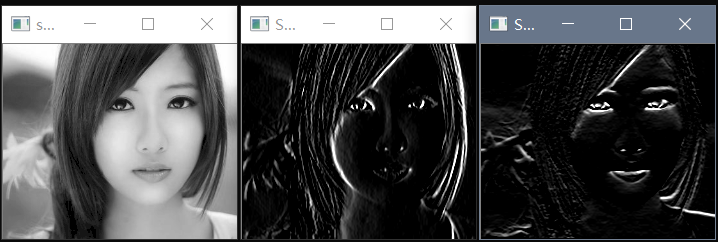
(分别为:原图、Sobel X方向,Sobel Y方向)
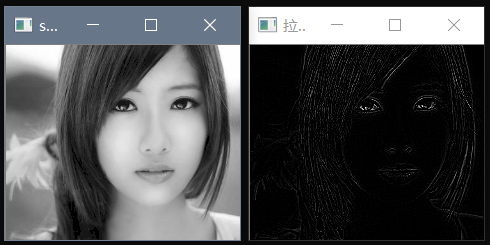
(分别为:原图、拉普拉斯算子)
代码解释:
卷积概念
卷积是图像处理中一个操作,是kernel在图像的每个像素上的操作。
Kernel本质上一个固定大小的矩阵数组,其中心点称为锚点(anchor point)

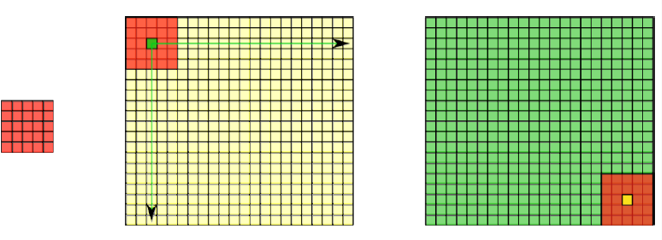
卷积如何工作
把kernel放到像素数组之上,求锚点周围覆盖的像素乘积之和(包括锚点),用来替换锚点覆盖下像素点值称为卷积处理。数学表达如下:

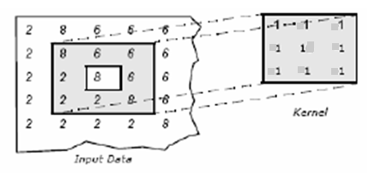
Sum = 8x1+6x1+6x1+2x1+8x1+6x1+2x1+2x1+8x1
New pixel = sum / (m*n)
常见算子
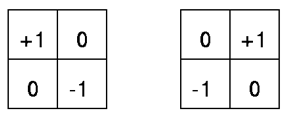
(Robert算子 左边为X方向,右边为Y方向)
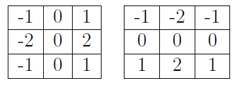
(Sobel算子)
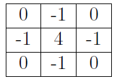
(拉普拉斯算子)
自定义卷积模糊
filter2D方法filter2D(
Mat src, //输入图像
Mat dst, // 模糊图像
int depth, // 图像深度32/8
Mat kernel, // 卷积核/模板
Point anchor, // 锚点位置
double delta // 计算出来的像素+delta
)
其中 kernel是可以自定义的卷积核
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文章代码及资料部分或全部来自贾志刚老师的视频,勇哥只是在个人理解的基础上做学习笔记,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:


")
")
常用的6种方法")
 封装运动功能")




:运行时api的说明")










