 少有人走的路
少有人走的路Halcon学习笔记:select_points_object_model_3d 3D对象模型阀值分割
This example program shows how to use the operators connection_object_model_3d and select_object_model_3d
in HALCON. First, a threshold is applied to the 3D object
model. Then, the connected components are calculated
based on the geometric distance. Finally, the connected
components are selected by their volume and diameter and
the result is displayed.
这个示例程序展示了如何在HALCON中使用connection_object_model_3d和select_object_model_3d操作符。
首先,对3D对象模型应用一个阈值。然后,根据几何距离计算连通分量。
最后,根据连接部件的体积和直径选择连接部件并显示结果。
源码:
dev_update_off () dev_close_window () * 1、加载X,Y, z数据,缩放到米,并生成一个3D对象模型 ImagePath := 'time_of_flight/' read_image (Image, ImagePath + 'engine_cover_xyz_01') * 缩放图像的灰度值 * 将图像放大一个给定的倍数 scale_image (Image, Image, .001, .0) zoom_image_factor (Image, Image, 2, 2, 'constant') decompose3 (Image, X, Y, Z) xyz_to_object_model_3d (X, Y, Z, ObjectModel3DID) * 2、计算模型的网格(Delaunay三角测量) * 为'segmentation',准备一个3D对象模型(如果要对同一操作多次使用3D对象模型,这样做会更快) prepare_object_model_3d (ObjectModel3DID, 'segmentation', 'true', [], []) * * 3、准备可视化并显示3D对象模型 create_pose (0.058, -0.165, 0.660, 345.0, 355.0, 356.0, 'Rp+T', 'gba', 'point', Pose) * * Instructions for visualize_object_model_3d Instructions[0] := 'Rotate: Left button' Instructions[1] := 'Zoom: Shift + left button' Instructions[2] := 'Move: Ctrl + left button' * Configuration gen_cam_par_area_scan_division (0.01, 0, 7e-6, 7e-6, 352, 288, 710, 576, CamParam) GenParamName := ['color','disp_pose','alpha'] GenParamValue := ['green','false',0.8] * dev_open_window (0, 0, 710, 576, 'black', WindowHandle) set_display_font (WindowHandle, 16, 'mono', 'true', 'false') * visualize_object_model_3d (WindowHandle, ObjectModel3DID, CamParam, Pose, GenParamName, GenParamValue, 'This scene will be segmented into single objects', [], Instructions, Pose) * * 4、阈值三维对象模型 MinValue := 0.500 MaxValue := 0.670 * 对3D对象模型应用阈值 select_points_object_model_3d (ObjectModel3DID, 'point_coord_z', MinValue, MaxValue, ObjectModel3DIDReduced) visualize_object_model_3d (WindowHandle, ObjectModel3DIDReduced, CamParam, Pose, GenParamName, GenParamValue, 'Result after thresholding at z=' + (MaxValue * 1e3)$'.3' + 'mm from the camera', [], Instructions, Pose) * * Calculate the connected components and the volume and diameter * of each of the resulting object * 5、计算连接分量和每个结果对象的体积和直径 GenParamName[0] := 'colored' GenParamValue[0] := 12 * 1)确定3D对象模型的连通分量 * 2)计算三维物体模型相对于平面[0,0,MaxValue,0,0,0,0]的体积 Volume * 3)计算3D对象模型的最大直径 Diameter connection_object_model_3d (ObjectModel3DIDReduced, 'distance_3d', 0.010, ObjectModel3DIDConnections) volume_object_model_3d_relative_to_plane (ObjectModel3DIDConnections, [0,0,MaxValue,0,0,0,0], 'signed', 'true', Volume) max_diameter_object_model_3d (ObjectModel3DIDConnections, Diameter) * * 6、显示结果 dev_open_window (0, 720, 400, 576, 'black', WindowHandle1) set_display_font (WindowHandle1, 14, 'mono', 'true', 'false') Indices := [0:|ObjectModel3DIDConnections| - 1] disp_message (WindowHandle1, ['Features of the connected components:',' ',' '], 'window', 12, 12, 'white', 'false') ResultMessage := ' # Max. diameter Volume' Sequence := [0:|ObjectModel3DIDConnections| - 1] ResultMessage := [ResultMessage,Sequence$' 3' + ' ' + (Diameter * 1e3)$'7.1f' + ' mm ' + (Volume * 1e3)$'7.3f' + ' dm³'] disp_message (WindowHandle1, ResultMessage, 'window', 50, 12, 'white', 'false') dev_set_window (WindowHandle) visualize_object_model_3d (WindowHandle, ObjectModel3DIDConnections, CamParam, Pose, GenParamName, GenParamValue, 'Found ' + |ObjectModel3DIDConnections| + ' connected components', '#' + Indices, Instructions, Pose) * * 7、根据组件的体积和最大直径选择组件 * MinVolume := 0.35e-003 MaxVolume := 1.0e-003 MinDiameter := 185.0e-003 MaxDiameter := 300.0e-003 ***** 8、注意: * select_object_model_3d使用平面[0,0,0,0,0,0]进行体积计算! * 因此,我们必须转换3d对象模型,以便参考平面(如前面对volume_object_model_3d_relative_to_plane的调用中定义的那样)与默认平面重合。 * * 1)生成三维变换的齐次变换矩阵 * 2)增加平移变换 * 3)求齐次三维变换矩阵的逆 hom_mat3d_identity (HomMat3DIdentity) hom_mat3d_translate (HomMat3DIdentity, 0, 0, -MaxValue, HomMat3DTranslation) hom_mat3d_invert (HomMat3DTranslation, HomMat3DInvert) affine_trans_object_model_3d (ObjectModel3DIDConnections, HomMat3DTranslation, ObjectModel3DTranslated) * 4)为每个部分设置标签 for Index := 0 to |ObjectModel3DIDConnections| - 1 by 1 set_object_model_3d_attrib_mod (ObjectModel3DTranslated[Index], '&Index', [], Index) endfor * 5)再次计算三维物体模型相对于平面[0,0,0,0,0,0,0]的体积 Volume1 * 6)从一组三维对象模型中选择三维对象模型('volume','diameter_object') volume_object_model_3d_relative_to_plane (ObjectModel3DTranslated, [0,0,0,0,0,0,0], 'signed', 'true', Volume1) select_object_model_3d (ObjectModel3DTranslated, ['volume','diameter_object'], 'and', [MinVolume,MinDiameter], [MaxVolume,MaxDiameter], ObjectModel3DSelected) * Title := ['Parts selected by using the following features: ',' ' + (MinVolume * 1e3)$'3.1f' + ' dm³ <= volume <= ' + (MaxVolume * 1e3)$'3.1f' + ' dm³','and: ' + (MinDiameter * 1e3)$'.1f' + ' mm <= max. diameter <= ' + (MaxDiameter * 1e3)$'.1f' + ' mm'] * 创建一个标签 Label := [] for Index := 0 to |ObjectModel3DSelected| - 1 by 1 get_object_model_3d_params (ObjectModel3DSelected[Index], '&Index', FormerIndex) Label := [Label,'#' + FormerIndex] endfor * if (|ObjectModel3DSelected| > 1) visualize_object_model_3d (WindowHandle, ObjectModel3DSelected, CamParam, [], GenParamName, GenParamValue, Title, Label, Instructions, Pose) else Message := 'No object left after using the following features: ' Message[1] := ' ' + (MinVolume * 1e3)$'3.1f' + ' dm³ <= volume <= ' + (MaxVolume * 1e3)$'3.1f' + ' dm³' Message[2] := 'and: ' + (MinDiameter * 1e3)$'.1f' + ' mm <= max. diameter <= ' + (MaxDiameter * 1e3)$'.1f' + ' mm' disp_message (WindowHandle, Message, 'window', 12, 12, 'black', 'true') endif * * Clear the 3d object models dev_set_window (WindowHandle1) dev_close_window () clear_object_model_3d ([ObjectModel3DID,ObjectModel3DIDReduced,ObjectModel3DSelected,ObjectModel3DTranslated,ObjectModel3DIDConnections])
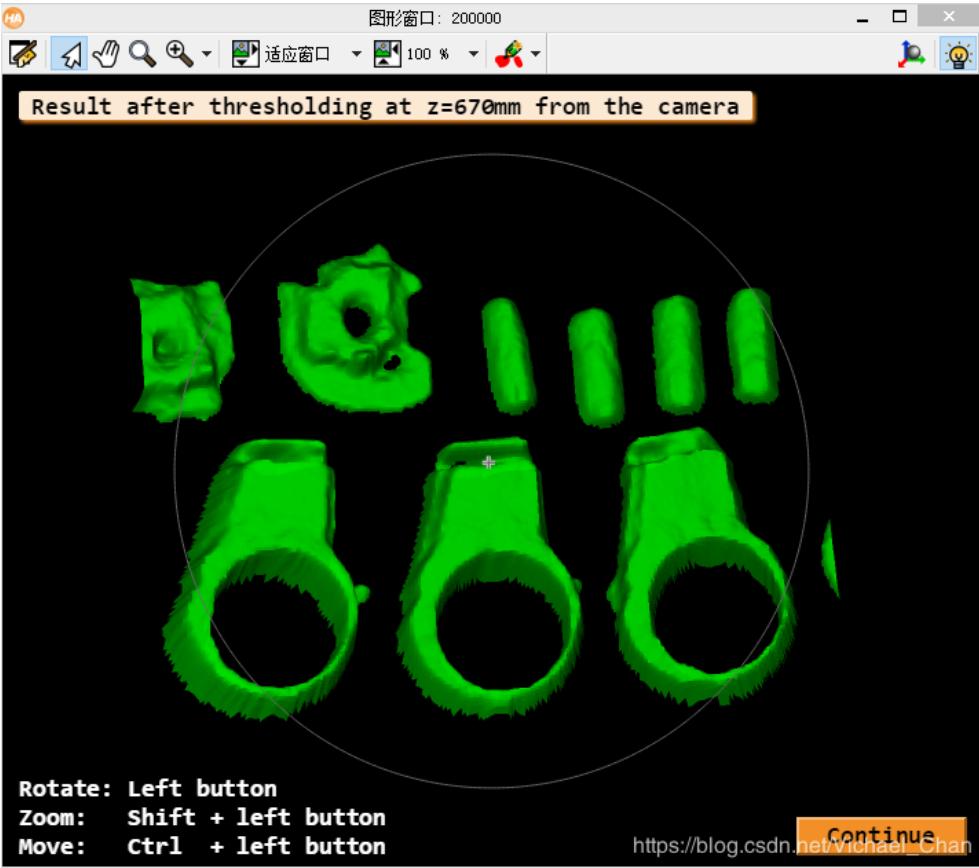
结果
1、生成3D model


2、计算连通分量的体积和最大直径


3、选择连通分量


————————————————
版权声明:本文为CSDN博主「Leon_Chan0」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/Vichael_Chan/article/details/102681389
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:


")
")
常用的6种方法")
 封装运动功能")














