 少有人走的路
少有人走的路模板可以由CAD,PROE,solidwork等软件绘制
常见的模板有机械组给我们的 STL 零件图
以及‘.om3’模型格式

读取模板(注意模板单位,贯穿整个程序)
显示模板,这个算子的参数我前两篇博客有详细讲到
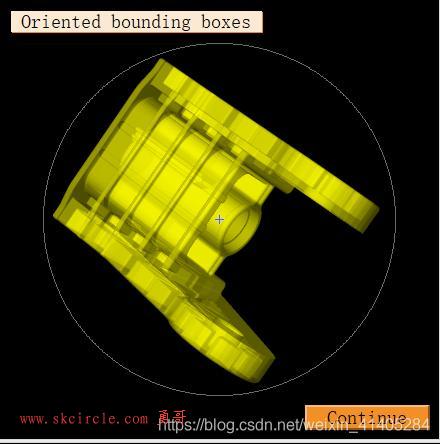
模板的旋转
三维模型的姿态有七个参数(x,y,z,Rx,Ry,Rz,0)
类比于二维的仿射变换
通过以下操作对模型进行旋转
注意:模型的初始角度很重要,角度调整有三大手法,在我后面的博文中有提到,调平的三大手法。enjoy.
x_t:=0 y_t:=0 z_t:=0 Rx_t:=90 Ry_t:=0 Rz_t:=0 TransPose:=[x_t,y_t,z_t,Rx_t,Ry_t,Rz_t,0] CamParam := [0.01,0,7e-6,7e-6,220,220,440, 440] rigid_trans_object_model_3d (ObjectModel3D, TransPose, ObjectModel3D2)
转载自:
https://blog.csdn.net/weixin_41405284/article/details/107130137
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")

:运行时api的说明")





Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





