 少有人走的路
少有人走的路(一)halcon标定步骤
1、创建标定数据模型
使用算子 create_calib_data( : : CalibSetup, NumCameras, NumCalibObjects : CalibDataID)
CalibSetup:创建的内容
NumCameras:相机个数
NumCalibObjects :标定项目数
CalibDataID:标定句柄
例如:
create_calib_data (‘calibration_object’, 1, 1, CalibDataID)
2、设置相机内部初始值
使用set_calib_data_cam_param 算子设置相机内部初始值
set_calib_data_cam_param( : : CalibDataID, CameraIdx, CameraType, CameraParam : )
CalibDataID:标定句柄
CameraIdx:相机序号
CameraType:相机模型种类;面阵相机Division畸变模型’area_scan_division’;polynomial畸变模型’area_scan_polynomial’……
CameraParam :与相机模型种类相对应的参数;面阵相机Division畸变模型’area_scan_division’([Focus, Kappa, Sx, Sy, Cx, Cy, ImageWidth, ImageHeight]);polynomial畸变模型’area_scan_polynomial’([Focus, K1, K2, K3, P1, P2, Sx, Sy, Cx, Cy, ImageWidth, ImageHeight]……
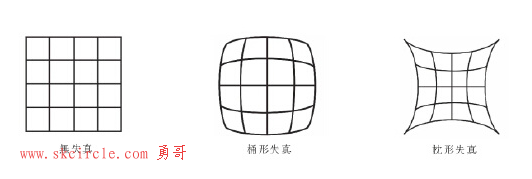
畸变模型选择
division畸变模型只适用于精度不高的,标定图片数量较少的情况:
polynomial畸变模型对径向畸变、切向畸变都进行矫正,精度较高,花费时间较长。
参数确定技巧
Focus代表焦距,按照我们镜头参数进行填写,远心镜头填写0
Kappa为畸变大小,因为在标定之前,所以默认填写0
Sx, Sy像元的宽高填写相机的像元尺寸。可以查相机手册,或者咨询相机厂家。
Cx, Cy填写图像的中心坐标
ImageWidth, ImageHeight填写图像的宽高
3、标定板初始化
使用算子 set_calib_data_calib_object
例如:
CaltabDescr := ‘caltab_100mm.descr’
set_calib_data_calib_object (CalibDataID, 0, CaltabDescr)
4、获取标定图片
标定板为正方形,尺寸大小为要照射区域宽度的1/3,相机拍摄或者读入9-16张图片,拍摄图片时标定板尽量覆盖整个视场;标定板圆点的直径不能小于10个像素。
5、使用图像进行相机内参标定,得到结果
方式一:
使用标定图像,直接用halcon全自动,进行标定
find_calib_object (Image, CalibDataID, CameraIndex, 0, PoseIndex, [], [])
得到标定数据
get_calib_data (CalibDataID, ‘camera’, 0, ‘type’, CameraType)
方式二:
1、寻找标定板区域,确定圆心,将结果加载到组元中
find_caltab(Image : CalPlate : CalPlateDescr, SizeGauss, MarkThresh, MinDiamMarks : )
find_marks_and_pose(Image, CalPlateRegion : : CalPlateDescr, StartCamParam, StartThresh, DeltaThresh, MinThresh, Alpha, MinContLength, MaxDiamMarks : RCoord, CCoord, StartPose)
set_calib_data_observ_points( : : CalibDataID, CameraIdx, CalibObjIdx, CalibObjPoseIdx, Row, Column, Index, Pose : )
原理:首先find_caltab算子对图像高斯滤波(核大小为SizeGauss),接着阈值分割(阈值大小为MarkThresh)将标定板的区域找出来;
find_marks_and_pose算子对区域中的圆进行分割,找到圆的个数,周长,坐标等应该和标定板描述文件中的一致,
否则会自动调整StartThresh,使得StartThresh按照DeltaThresh步长减小到MinDiamMarks ,直到找到准确的圆心。
进行标定
calibrate_cameras( : : CalibDataID : Error) 返回平均投影误差Error
6、使用图像进行相机外参标定,得到结果
摄像机外参:决定摄像机坐标系与世界坐标系之间相对位置关系
其中Pw为世界坐标,Pc为摄像机坐标,T=(Tx,Ty,Tz)是平移向量,R=(a,b,r)是旋转矩阵,分别是绕摄像机坐标系Z轴旋转角度为r;绕摄像机坐标系Y轴旋转角度为b;绕摄像机坐标系X轴旋转角度为a。6个参数组成摄像机外参(a,b,r,Tx,Ty,Tz)
并且满足下式:
Pc=R*Pw+T
具体步骤:
set_calib_data_cam_param( : : CalibDataID, CameraIdx, CameraType, CameraParam : )
set_calib_data_calib_object( : : CalibDataID, CalibObjIdx, CalibObjDescr : )
find_calib_object(Image : : CalibDataID, CameraIdx, CalibObjIdx, CalibObjPoseIdx, GenParamName, GenParamValue : )
get_calib_data_observ_contours( : Contours : CalibDataID, ContourName, CameraIdx, CalibObjIdx, CalibObjPoseIdx : )
get_calib_data_observ_points( : : CalibDataID, CameraIdx, CalibObjIdx, CalibObjPoseIdx : Row, Column, Index, Pose)
set_origin_pose( : : PoseIn, DX, DY, DZ : PoseNewOrigin)
参考代码:
**创建标定板
gen_caltab(7,7,0.008,0.5,'48_48mm.descr','48_48mm.ps')
*=======标定内参
dev_close_window ()
dev_open_window (0, 0, 652, 494, 'black', WindowHandle)
dev_update_off ()
dev_set_draw ('margin')
dev_set_line_width (3)
OpSystem := environment('OS')
set_display_font (WindowHandle, 14, 'mono', 'true', 'false')
*标定相机
StartCamPar := [0.0,0.0,0.0000299,0.0000299,4896/2,3264/2,4896,3264]
create_calib_data ('calibration_object', 1, 1, CalibDataID)
set_calib_data_cam_param (CalibDataID, 0, 'area_scan_telecentric_division', StartCamPar)
set_calib_data_calib_object (CalibDataID, 0, '48_48mm.descr')
for index := 1 to 13 by 1
read_image (Image, '标定20/' + index + '.png')
get_image_size(Image, Width, Height)
dev_display (Image)
find_calib_object (Image, CalibDataID, 0, 0, index, [], [])
get_calib_data_observ_contours (Caltab, CalibDataID, 'caltab', 0, 0, index)
dev_set_color ('green')
dev_display (Caltab)
endfor
calibrate_cameras (CalibDataID, Error)
get_calib_data (CalibDataID, 'camera', 0, 'params', CamParam)
get_calib_data (CalibDataID, 'calib_obj_pose', [0,1], 'pose', PoseCalib)
*输出计算的相机内参
write_cam_par (CamParam, 'camera_parameters.dat')
Message:= '相机内参已经写入文件中'
disp_message (WindowHandle, Message, 'window', 12, 12, 'red', 'false')
clear_calib_data (CalibDataID)
stop()
*=====标定外参
dev_set_draw ('margin')
dev_set_line_width (1)
set_display_font (WindowHandle, 14, 'mono', 'true', 'false')
*从文件中读取内参 存储文件:camera_parameters.dat
try
read_cam_par ('camera_parameters.dat', CamParam)
catch (Exception)
stop ()
endtry
*开始计算
open_file('data.csv','output', FileHandle)
fwrite_string(FileHandle,'Dis_pix*0.0299204,Dis_m*1000,Distance')
fnew_line (FileHandle)
close_file(FileHandle)
*选择一张作为标定作为最终标定位姿(任意一张都可以)
index:=1
read_image (Image,'标定20/'+index+'.png')
dev_display (Image)
CaltabName := '48_48mm.descr'
create_calib_data ('calibration_object', 1, 1, CalibDataID)
set_calib_data_cam_param (CalibDataID, 0, 'area_scan_telecentric_division', CamParam)
set_calib_data_calib_object (CalibDataID, 0, CaltabName)
find_calib_object (Image, CalibDataID, 0, 0, 1, [], [])
get_calib_data_observ_contours (Caltab, CalibDataID, 'caltab', 0, 0, 1)
get_calib_data_observ_points (CalibDataID, 0, 0, 1, RCoord, CCoord, Index, PoseForCalibrationPlate)
dev_set_color ('green')
dev_display (Caltab)
dev_set_color ('red')
disp_caltab (WindowHandle, CaltabName, CamParam, PoseForCalibrationPlate, 1)
dev_set_line_width (1)
disp_circle (WindowHandle, RCoord, CCoord, gen_tuple_const(|RCoord|,1.5))
* caltab_points (CaltabName, X, Y, Z)
* calibrate_cameras (CalibDataID, Error)
* To take the thickness of the calibration plate into account, the z-value
* of the origin given by the camera pose has to be translated by the
* thickness of the calibration plate.
* Deactivate the following line if you do not want to add the correction.
set_origin_pose (PoseForCalibrationPlate, 0, 0, 0, PoseCalib)
* disp_continue_message (WindowHandle, 'black', 'true')
* stop ()
*像素距离
distance_pp(RCoord[0],CCoord[0],RCoord[48],CCoord[48], Dis_pix)
*像素直接转换mm然后计算
pix2mm(RCoord, CCoord,CamParam[2],CamParam[3],newCol,newRow)
distance_pp(newRow[0],newCol[0],newRow[48],newCol[48], Dis_m)
*用同一个世界坐标系来计算
image_points_to_world_plane(CamParam, PoseCalib,[RCoord[0],RCoord[48]], [CCoord[0],CCoord[48]], 'mm', X1, Y1)
distance_pp(Y1[0],X1[0],Y1[1],X1[1],Distance)
*输出计算结果比较
open_file('data.csv','append', FileHandle)
fwrite_string(FileHandle, Dis_pix*0.0299+','+Dis_m*1000+','+Distance+'\n')
close_file(FileHandle)
Message:= '计算完毕'
disp_message (WindowHandle, Message, 'window', 12, 12, 'red', 'false')
stop()(二)halcon标定中常见算子
勇哥把几个常见的halcon标定相关的算子,机译了官方文档并适当修改,以方便查阅。
find_calib_object http://47.98.154.65/?id=1578
get_calib_data http://47.98.154.65/?id=1579
get_calib_data_observ_points http://47.98.154.65/?id=1582
image_points_to_world_plane http://47.98.154.65/?id=1580
把图像坐标转化成Z=0平面的世界坐标,输出为世界坐标的X,Y
set_origin_pose http://47.98.154.65/?id=1581
calibrate_hand_eye http://47.98.154.65/?id=1568
affine_trans_point_3d
进行两个坐标系之间的3D坐标的仿射变换。
hom_mat3d_rotate_local
相对于新坐标系统,增加一个绕着某个坐标轴的旋量到齐次矩阵HomMat3D中,输出为新的齐次矩阵。
hom_mat3d_translate_local
相对于新坐标系统,增加一个平移量到齐次矩阵HomMat3D中,输出为新的齐次矩阵。
hom_mat3d_to_pose
把齐次矩阵转化为3D位姿态。利用0类代码,即先平移顺序RPT,旋转gba,以点的形式表达位姿。
pose_to_hom_mat3d
把3D位姿转化成齐次变换矩阵。
gen_image_to_world_plane_map
生成一个投影映射图,它描述了在一个世界坐标系中图像平面与z=0平面(测量平面)之间的映射。此映射可用于使用map_image操作符对图像进行校正。校正后的图像既无径向畸变,也无透视畸变;它对应于由垂直于测量平面的无畸变相机获取的图像
map_image
对图像进行校正,输出为校正后的图像。
pose_invert
hom_mat3d_compose
输出两个齐次矩阵的乘积。
project_3d_point
把3D点映射到图像坐标系,返回图像坐标系中该点的行列坐标。
即把摄像机坐标下的点投影到图像坐标系,输出为图像坐标系下的行列坐标
create_pose
disp_3d_coord_system
vector_to_pose
计算世界坐标和图像坐标之间关系的绝对位姿参数。其中世界坐标至少选择不在同一条直线上的三个点。
世界坐标上的点如果在一个平面上,应该选择'planar_analytic' 作为Method的参数。输出位姿和位姿质量。
disp_caltab
利用相机内外参数,把标定板模型投影到图像平面,显示标定点和连接线,X,Y轴也被显示出来。
get_cam_par_names
外部用户过程 ,用来按名称字符串取相机内参。内参名称如下:
['camera_type', 'focus', 'kappa', 'sx', 'sy', 'cx', 'cy', 'image_width', 'image_height']
contour_to_world_plane_xld
转换XLD轮廓进入Z=0的世界坐标平面,输出形式为xld_cont(-array) → object
3D位姿相关算子
create_pose
创建3D位姿
hom_mat3d_to_pose
齐次变换矩阵转换为3D位姿
pose_to_hom_mat3d
3D位姿转换为齐次变换矩阵
convert_pose_type
改变位姿类型
write_pose
将位姿写入本地文件
read_pose
从本地文件读取位姿
set_origin_pose
沿着新轴转换位姿;
pose_invert
翻转一个位姿
pose_compose
两个位姿相乘
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")



Qt Widgets Designer界面设计器和界面应用")
")


:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





