 少有人走的路
少有人走的路勇哥注: 设备的动作可以是plc,或者是运动控制来完成。 后者是一台工业电脑配上运动板卡来完成。 在有些工厂里,可能由客户喜好更喜欢用运动控制(比如富士康的苹果客户, 因为PC机和工厂的生产系统进行通讯要更方便一些,并且对视觉的配合要更好些)。 基于IPC和windows的运动控制,可靠性是没有plc好的。 因为plc相当于是一个专用小系统,并且是实时扫描的。可靠性是相当高。 但是PC有自己的优势,比如复杂和精密的视觉处理的设备都是离不开运动控制的, 因为运动卡能提供更复杂的运动能力和精度保证,plc只能做一些简单的ptp运动。
系列贴子导航:
C#编写运动控制:自定义回原(五) 验证自定义回原精度,并提出解决方案
C#编写运动控制:自定义回原(三) 回原时为什么会出现运动指令无效跳过的现象
C#编写运动控制:自定义回原(二) 限位做为回原、限位反找回原
运动控制之自定义回原(三)
继上节说到的一个问题。
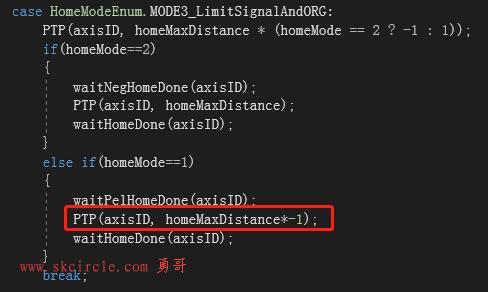
回原的时候为啥有些PTP语句会被跳过执行?

反复“正回原点”时,会有机率出现下图所标注的ptp语句被跳出的现象(即没有运动的效果)。
此时直接执行到waitHomeDone()。程序因此被卡住。
这个问题按勇哥的经验主要是三个方面需要改进。
不要从ui线程中调用回原。
从ui线程回原,还会发生其它的怪现象,例如有可能回原清零后还是带有几百个脉冲,不能清零干净。
而这个现象是分机台的,跟电脑配置有关系。有些电脑上不会出现,有些会出现。
在循环等待运动完成的函数中,不要使用Application.DoEvents()
这个问题见贴子:http://47.98.154.65/?id=1927
3. 在ptp运动执行前,务必再次判断轴是否为停止状态
即使ptp之前执行过轴停止,但是如果马上ptp,有可能轴还是没停稳,ptp就有机率执行跳出。
本文视频讲解:
本文源码资料下载:
扫码收费5元,勇哥用以支付本站服务器费用。
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:


")
")
常用的6种方法")
 封装运动功能")














