 少有人走的路
少有人走的路在jump等指令说明里面,经常提到第1 关节、第2 关节、第3关节、第4 关节,勇哥刚开始接触不知道指的是哪里?
因此查了下资料,在此记上一笔扫扫盲。
下面以EPSON四轴机器手来说明。
见图1所示, j1,j2,j3,j4分别指第1 关节、第2 关节、第3关节、第4 关节。
其中关节j1,j2,j4是可以旋转的,j3关节则可以上下直线运动。
图2是平面示意图,也标注得比较清楚。
图3是“机器人管理器”中的“关节”模式,按上面的jog+-按钮可以生动的观察4个关节动作的效果。
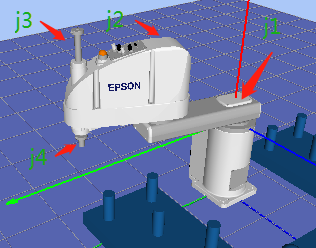
(图1)

(图2)

(图3)
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")







Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





