 少有人走的路
少有人走的路命名空间:netMarketing.automation.Robot.Epson
功能:Epson机器人的远程控制类
功能详细说明:
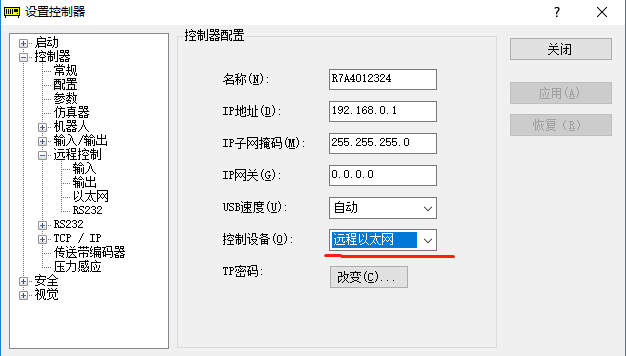
EpsonRobot类是一个用于以太网远程控制Epson机器人的类。
使用前,先把机器人的控制器配置为“远程以太网”模式。
有关远程控制的知识,请参考勇哥另一篇贴子的介绍:
Epson机器人远程控制指令测试
注意:使用这个类需要使用netMarketing V1.3.0及以上的版本。
常用函数列表:
/// 配置
public ConfigBase Config { get { return config; } }
/// IO输入配置
public IO24Config InConfig { get { return inConfig; } set { inConfig = value; } }
/// IO输出配置
public IO16Config OutConfig { get { return outConfig; } set { outConfig = value; } }
/// 设备状态
public Status Status { get { return status; } }
/// 连接状态
public bool IsConnected { get { return isConnected; } }
/// 登陆状态
public bool IsLogin { get { return isLogin; } set { isLogin = value; } }
/// 是否在执行命令
public bool IsExeCMD { get { return isExeCMD; } set { isExeCMD = value; } }
/// 设置工具坐标
public int ToolNo
public EpsonRobot(int id, string name) : base(id, name)
/// 初始化
public bool Init()
/// 暂停
public bool? Pause()
/// 连接
public bool Connect()
/// 关闭连接
public void Close()
/// 登陆
public bool Login()
/// 登出
public bool LoginOut()
/// 执行命令
public bool? ExecuteCMD(ERemotCMD cmd, params string[] param)
/// <summary>
/// 爱普生机器人远程控制命令
/// </summary>
public enum ERemotCMD
{
/// <summary>
///登陆
/// </summary>
Login,
/// <summary>
/// 登出
/// </summary>
Logout,
/// <summary>
/// 执行指定编号的函数
/// </summary>
Start,
/// <summary>
/// 停止所有的任务和命令
/// </summary>
Stop,
/// <summary>
/// 暂停所有任务
/// </summary>
Pause,
/// <summary>
/// 继续暂停了的任务
/// </summary>
Continue,
/// <summary>
/// 清除紧急停止和错误
/// </summary>
Reset,
/// <summary>
/// 打开机器人电机
/// </summary>
SetMotorsOn,
/// <summary>
/// 关闭机器人电机
/// </summary>
SetMotorsOff,
/// <summary>
/// 选择机器人
/// </summary>
SetCurRobot,
/// <summary>
/// 过去当前的机器人编号
/// </summary>
GetCurRobot,
/// <summary>
/// 将机器人手臂移动到由用户定义的起始点位置上
/// </summary>
Home,
/// <summary>
/// 获取指定的I/O位
/// </summary>
GetIO,
/// <summary>
/// 设置I/O指定位
/// </summary>
SetIO,
/// <summary>
/// 获得指定的I/O端口(8位
/// </summary>
GetIOByte,
/// <summary>
/// 设置I/O指定端口(8位)
/// </summary>
SetIOByte,
/// <summary>
/// 获得指定的I/O字端口(16位)
/// </summary>
GetIOWord,
/// <summary>
/// 设置I/O指定字端口(8位)
/// </summary>
SetIOWord,
/// <summary>
/// 获取指定的内存I/O位
/// </summary>
GetMemIO,
/// <summary>
/// 设置指定的内存I/O位
/// </summary>
SetMemIO,
/// <summary>
/// 获取指定内存I/O端口
/// </summary>
GetMemIOByte,
/// <summary>
/// 设置指定的内存I/O端口(8位)
/// </summary>
SetMemIOByte,
/// <summary>
/// 获取指定的内存I/O字端口(16位)
/// </summary>
GetMemIOWord,
/// <summary>
/// 设置指定的内存I/O字端口(16位)
/// </summary>
SetMemIOWord,
/// <summary>
/// 获取备份(全局保留)参数的值
/// </summary>
GetVariable,
/// <summary>
/// 获取备份(全局保留)数组参数的值
/// </summary>
SetVariable,
/// <summary>
/// 获取控制器的状态
/// </summary>
GetStatus,
/// <summary>
/// 执行命令
/// </summary>
Execute,
/// <summary>
/// 中止命令的执行
/// </summary>
Abort,
/// <summary>
/// 空命令
/// </summary>
NULL,
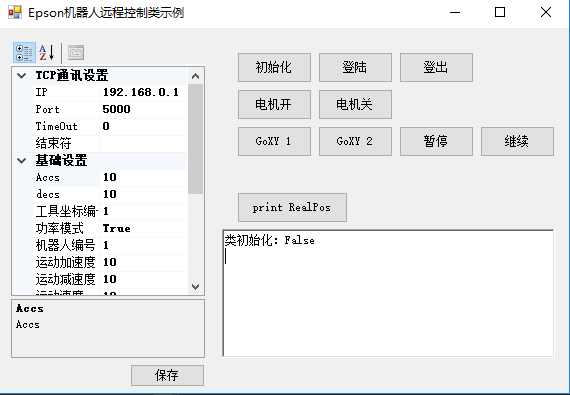
}参考例子:
using netMarketing.automation.baseClass;
using netMarketing.automation.hardware.Light;
using netMarketing.automation.Robot.Epson;
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
namespace demo
{
public partial class Form1 : Form
{
EpsonRobot RobotBusines = new EpsonRobot(123, "epson");
public Form1()
{
InitializeComponent();
NotifyG.EventHandlerNotify += NotifyG_EventHandlerNotify;
RobotBusines.Config.Folder = "Robot";
RobotBusines.Config.Name = "epson";
}
private void NotifyG_EventHandlerNotify(object sender, NotifyEventArgs e)
{
rtbMsg.AppendText(e.Message);
}
private void Form1_Load(object sender, EventArgs e)
{
}
private void button1_Click(object sender, EventArgs e)
{
rtbMsg.AppendText($"登陆:{RobotBusines.Login()}\r\n");
}
private void btnSave_Click(object sender, EventArgs e)
{
rtbMsg.AppendText($"参数保存:{ RobotBusines.Config.Save()}\r\n");
}
private void button2_Click(object sender, EventArgs e)
{
rtbMsg.AppendText($"登出:{RobotBusines.LoginOut()}\r\n");
}
private void button3_Click(object sender, EventArgs e)
{
RobotBusines.ExecuteCMD(ERemotCMD.SetMotorsOn, "1");
}
private void button8_Click(object sender, EventArgs e)
{
rtbMsg.AppendText($"类初始化:{RobotBusines.Init()}\r\n");
propertyGrid1.SelectedObject = RobotBusines.Config;
}
private void button9_Click(object sender, EventArgs e)
{
RobotBusines.Pause();
}
private void button10_Click(object sender, EventArgs e)
{
RobotBusines.ExecuteCMD(ERemotCMD.Continue,"1");
}
private void button4_Click(object sender, EventArgs e)
{
RobotBusines.ExecuteCMD(ERemotCMD.SetMotorsOff, "1");
}
private void button5_Click(object sender, EventArgs e)
{
RobotBusines.ExecuteCMD(ERemotCMD.Execute, "Go XY(0, 450, 260, 90, 0, 180)");
}
private void button6_Click(object sender, EventArgs e)
{
RobotBusines.ExecuteCMD(ERemotCMD.Execute, "Go XY(0, 250, 360, 110, 0, 120)");
}
private void button7_Click(object sender, EventArgs e)
{
RobotBusines.ExecuteCMD(ERemotCMD.Execute, "print RealPos");
}
}
}---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:

本帖最后由 勇哥,很想停止 于 2019-07-18 15:34:49 编辑 

")
")
常用的6种方法")
 封装运动功能")







Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





