 少有人走的路
少有人走的路边缘检测的定义 :使用数学方法提取图像像元中具有亮度值(灰度)空间方向梯度大的边、线特征的过程。
边缘 是指周围像素灰度有阶跃变化或屋顶等变化的那些像素的集合。图像的边缘对应着图像灰度的不连续性。显然图像的边缘很少是从一个灰度跳到另一个灰度这样的理想状况。真实图像的边缘通常都具有有限的宽度呈现出陡峭的斜坡状。边缘的锐利程度由图像灰度的梯度决定。梯度是指灰度变化的最快的方向和数量。
常见的边缘点有三种 :第一种是阶梯形边缘 (Step-edge), 即从一个灰度到比它高好多的另一个灰度。第二种是屋顶型边缘 (Roof-edge), 它的灰度是慢慢增加到一定程度然后慢慢减小。还有一种是线性边缘 (Line-edge), 它的灰度从一级别跳到另一个灰度级别之后然后回来。
边缘检测的方法主要有以下几种:
第一种检测梯度的最大值。由于边缘发生在图像灰度值变化比较大的地方 ,对应连续情形就是说是函数梯度较大的地方,所以研究比较好的求导算子就成为一种思路。 Roberts 算子、 Prewitt 算子和 Sobel 算子等就是比较简单而常用的例子。还有一种比较直观的方法就是利用当前像素邻域中的一些像素值拟合一个曲面 , 然后求这个连续曲面在当前像素处梯度。从统计角度来说 , 我们可以通过回归分析得到一个曲面 , 然后也可以做类似的处理。
第二种是检测二阶导数的零交叉点。这是因为缘处的梯度取得最大值 ( 正的或者负的 ), 也就是灰度图像的拐点是边缘。从分析学上我们知道 , 拐点处函数的二阶导数是 0 。
第三种,统计型方法。比如说利用假设检验来检测边缘中利用对二阶零交叉点的统计分析得到了图像中各个像素是边缘的概率,并进而得到边缘检测的方案。
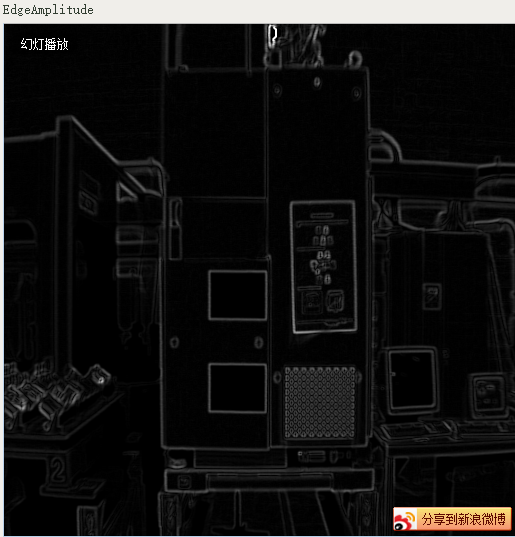
1.sobel_amp(Image : EdgeAmplitude : FilterType, Size : )
根据图像的一次导数计算图像的边缘
程序如下:
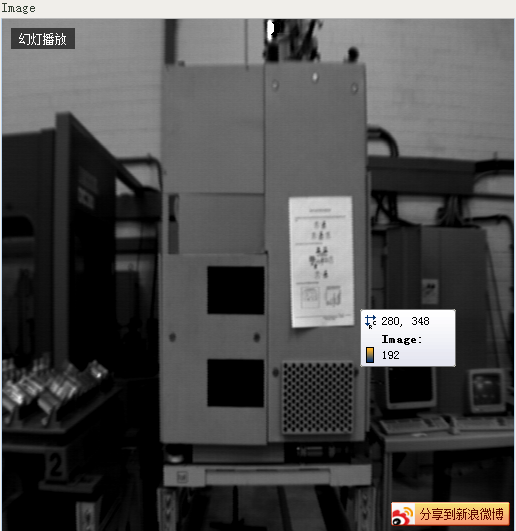
read_image (Image, 'fabrik')
sobel_amp (Image, EdgeAmplitude, 'sum_abs', 3)
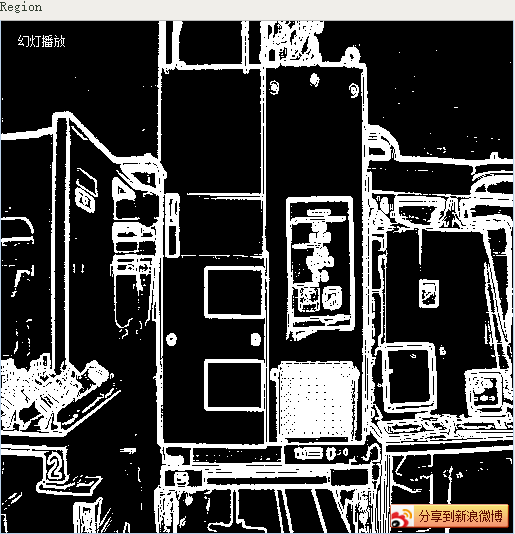
threshold (EdgeAmplitude, Region, 10, 255)
skeleton (Region, Skeleton)
dev_display (Image)
dev_set_color ('white')
dev_display (Skeleton)
Image


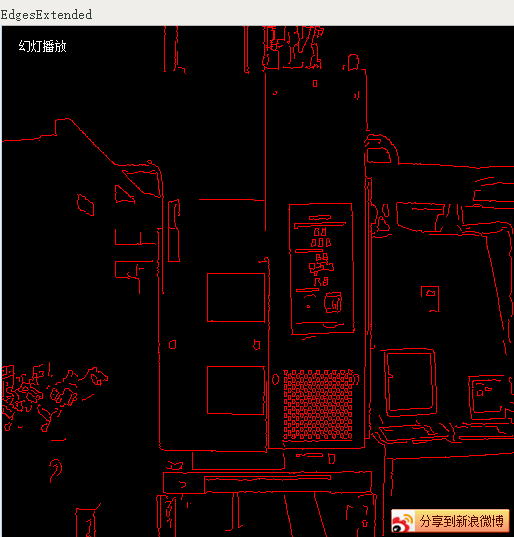
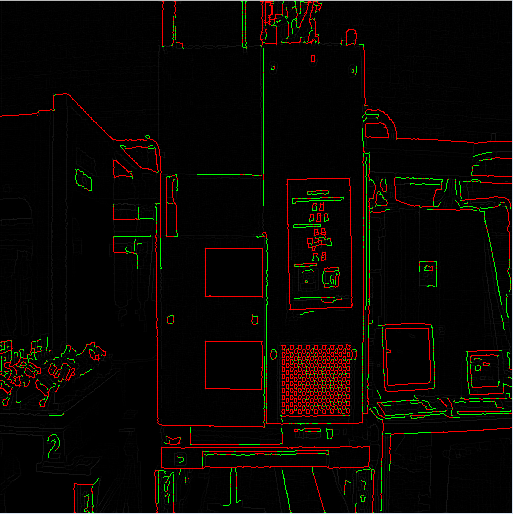
2.close_edges(Edges, EdgeImage : RegionResult : MinAmplitude : )
程序如下:
read_image (Image, 'fabrik')
dev_close_window ()
get_image_size (Image, Width, Height)
dev_open_window (0, 0, Width, Height, 'black', WindowID)
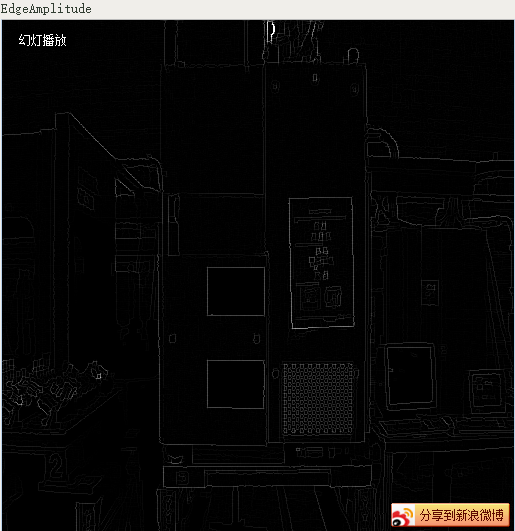
sobel_amp (Image, EdgeAmplitude, 'thin_sum_abs', 3)
threshold (EdgeAmplitude, Edges, 30, 255)
close_edges (Edges, EdgeAmplitude, EdgesExtended, 15)
dev_set_color ('green')
dev_display (EdgesExtended)
dev_set_color ('red')
dev_display (Edges)

sobel_amp ( Image : EdgeAmplitude : FilterType, Size : )根据图像的一次导数计算图像的边缘
close_edges ( Edges, EdgeImage : RegionResult : MinAmplitude : )
close_edges_length ( Edges, Gradient : ClosedEdges : MinAmplitude, MaxGapLength : ) 使用边缘高度图像关闭边缘间隙。输出的区域包含杯关闭的区域。(感觉是对边缘的扩充)
derivate_gauss ( Image : DerivGauss : Sigma, Component : )
watersheds ( Image : Basins, Watersheds : : ) 从图像中提取风水岭。
zero_crossing ( Image : RegionCrossing : : ) 零交点(二次导数)
diff_of_gauss ( Image : DiffOfGauss : Sigma, SigFactor : ) 近似日志算子( 拉普拉斯高斯) 。
laplace_of_gauss ( Image : ImageLaplace : Sigma : ) 拉普拉斯高斯
edges_color_sub_pix ( Image : Edges : Filter, Alpha, Low, High : )
精确的亚像素边缘提取(彩色图像)
ges_sub_pix ( Image : Edges : Filter, Alpha, Low, High : ) 精确边缘提取的亚像素(灰度图像)
edges_color ( Image : ImaAmp, ImaDir : Filter, Alpha, NMS, Low, High : ) 根据颜色进行边缘提取
edges_image ( Image : ImaAmp, ImaDir : Filter, Alpha, NMS, Low, High : ) 边缘提取
skeleton ( Region : Skeleton : : ) 计算区域的框架 Skeleton == Region
frei_amp ( Image : ImageEdgeAmp : : ) Frei-chen 模板进行边缘检测(振幅)
frei_dir ( Image : ImageEdgeAmp, ImageEdgeDir : : ) Frei-chen 模板进行边缘检测(振幅和方向)
nonmax_suppression_dir ( ImgAmp, ImgDir : ImageResult : Mode : ) 使用方向图像 抑制所有的超过给定最大值的图像灰度值的点
gen_contours_skeleton_xld ( Skeleton : Contours : Length, Mode : ) 将系统框架转换成 XLD 轮廓
laplace ( Image : ImageLaplace : ResultType, MaskSize, FilterMask : ) 使用有限差分计算拉普拉斯变换
info_edges ( : : Filter, Mode, Alpha : Size, Coeffs ) 估计滤波器的宽度
kirsch_dir ( Image : ImageEdgeAmp, ImageEdgeDir : : ) 使用Kirsch 算子计算出边缘(振幅和方向)
prewitt_amp ( Image : ImageEdgeAmp : : ) 使用 Prewitt 算子计算出边缘(振幅)
kirsch_amp ( Image : ImageEdgeAmp : : ) 使用 Kirsch 算子计算出边缘(振幅)
highpass_image ( Image : Highpass : Width, Height : ) 从高频成分提取的图像。
sobel_amp ( Image : EdgeAmplitude : FilterType, Size : )使用 Sobel 算子计算出边缘(振幅)
robinson_amp ( Image : ImageEdgeAmp : : ) 使用 Robinson 算子计算出边缘(振幅)
roberts ( Image : ImageRoberts : FilterType : ) 使用 Robert算子计算边缘




")
")
常用的6种方法")
 封装运动功能")







Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





