 少有人走的路
少有人走的路旋转中心标定方式的说明
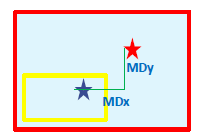
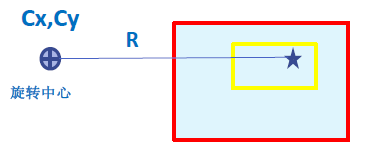
在下面的图例中,红色为相机视野(FOV),黄色为工件,五星为Mark点。
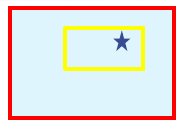
(训练的标准位置)

(工件发生平移)

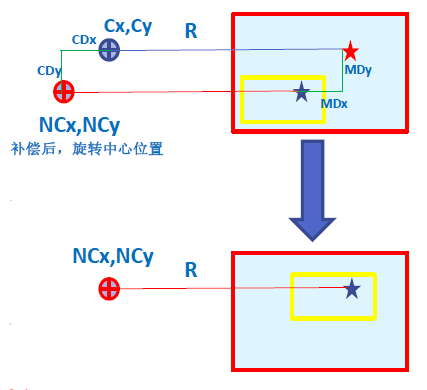
(工件发生旋转与平移)
(图4)
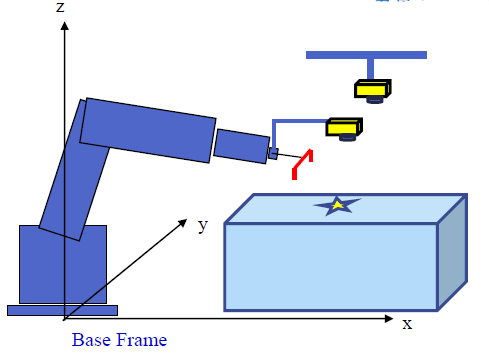
旋转中心方法用于所有机器人与视觉配合场景
方法 :计算工件实际发生的偏移量 和旋转,结合机器人的旋转中心进行二次补偿后 ,把补偿量 发送给机器人 ,然后机器人把补偿量进行抓取或放置即可。
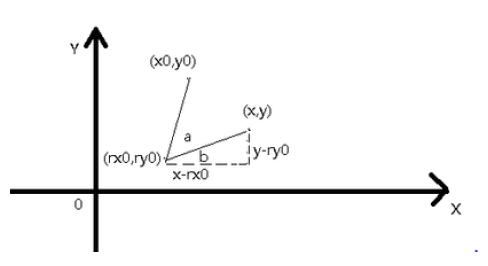
计算 某个点绕另外一旋转定角度后的坐 标,如图 :A(x,y)绕 B(rx0 ,ry0) 旋转a度后的位置为 C(x0,y0 ),则有如 下关系式:
x0= cos (a) * (x -rx0) – sin (a) *(y-ry0) +rx0
y0= cos (a) * (y- ry0) + sin (a) *(x-rx0) +ry0
(图5)
下面的所有计算旋转与偏移量都是基于上面的公式。
工件发生偏移
(图6)
(图7)
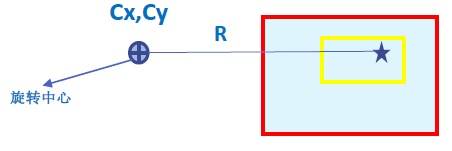
{Cx,Cy } 旋转中心坐标; {Mx,My } 工件 Mark坐标。
{MDx,MDy},Mark偏移量。
{RDx,Rdy}, 发送给机器人的补偿量。
工件发生平移时,
在拍照位置进行拍照后 ,与开始训练标准位置时,Mark点成像会产生偏移。
Mark 偏移量 MDx =RDx;MDy =RDy ;
如上图即相机计算出的 Mark 点偏移量 ,可以直接补偿给机器人,然后进行抓取即可。
(图8)
作为测试 ,可以机器人在拍照位置进行补偿后 ,Z轴不变然后再拍照 ,会获得和拍照位置一样的图像。
工件发生平移与旋转
(图9)

(图10)
工件发生平移和旋转时
在拍照位置进行后 ,与开始训练标准位置时 ,Mark 点成像会产生偏移;
Mark 偏移量 MDx #RDx, MDy#RDy ;如左上图即相机计算出的 MarkMark 点偏移量 ,不能直接补偿给机器人 ,需要计算出 RDx 和RDy,和RDr ,MDr 然后补偿给机器人 ,机器人补偿后才能进行抓取。

(图11)

(图12)
作为测试 ,可以机器人在拍照位置进行补偿后 ,Z轴不变然后再拍照 ,会获得和拍照位置一样的图像;
计算过程,旋转角度a




")
")
常用的6种方法")
 封装运动功能")
:QWidget,QMainWindow")






Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





