 少有人走的路
少有人走的路勇哥这套halcon引擎的学习笔记贴子共七篇,它是在官方指导文档《http://47.98.154.65/?id=1343》的基础上学习编写而成的笔记。只是有一篇讲解怎么调用向量变量的没有加入,因为勇哥实在不知道这个向量变量有啥子用。以后如果搞明白了再加入吧。
2020/7/3勇哥注:
原来halcon中的向量就是个容器,跟c++标准模板库中的那个向量是一致的。第八篇加上来吧
halcon引擎学习笔记(七)在在HDevEngine/C#中使用实时编译器JIT
halcon引擎学习笔记(六)多线程并发执行外部函数,多窗口显示
halcon引擎学习笔记(二)执行Procedure程序,扩展名为hdvp的halcon函数
演示程序勇哥用的是halcon19.11,C#使用的是vs2013版本。
全部测试代码勇哥已经打包,请点击《下载》
如果你要调用的程序是一个hdev主程序,且当中没有外部函数或者自定义函数,则可以看(一)
如果你要调用的程序是一个hdev主程序,且当中有若干的外部函数或者自定义函数,则可以看(三)
如果你要调用的程序只是一个hdvp的外部函数,则可以看(二)
如果你需要多线程调用外部函数,则可以看(六)(七)
如果你的程序中用到向量变量,则可以看(八)
2020/10/15勇哥注:
勇哥最近寻遍halcon引擎类的功能,发现无法实现修改halcon程序并保存后,C#这边能实时运行修改后的halcon程序。
必须要退出C#程序后,再次执行才是跑的修改后的代码。
这真是个遗憾,因为机器正在做货时,重启C#程序是相当不方便的一件事。
如果有人知道怎么实现,麻烦告诉勇哥,非常感谢!
2020/12/18勇哥注:
由网友“小黄鱼”指出,HDevEngine 类有个UnloadProcedure方法调用后,可以实现不需要重启C#程序即可执行更新后的外部函数。
经我测试后,发现是有效的!
在这里非常感谢他的指点!!!
正文部分
========================
这篇说说创建多线程HDevEngine应用程序时要遵守的最重要的规则。当多个线程并行执行HDevelop程序时,每个线程必须创建其自己的相应HDevProgramCall实例。
对于HDevEngine的所有实例,外部过程路径和HDevelop显示操作的实现总是全局设置的。所以建议通过单独的HDevEngine实例来设置它们,以使代码更具可读性。
因为HDevelop的显示操作的实现只能全局设置,所以它必须是线程安全且可重入的。
多线程并发执行外部函数
它由四个线程组成:主线程负责图形用户界面(GUI)。
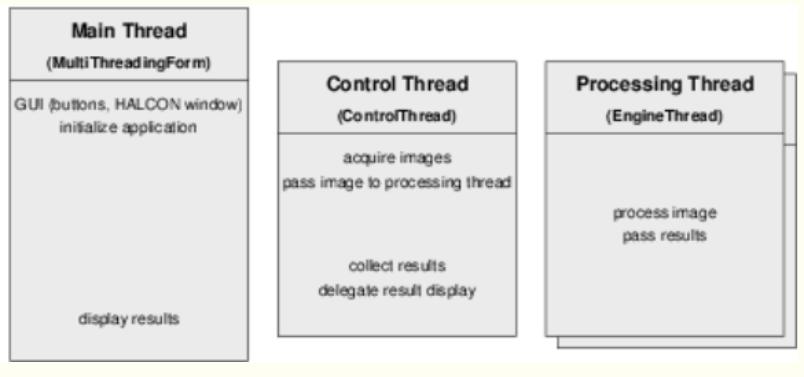
主线程还通过HDevelop过程训练形状模型,并通过创建和初始化其他三个线程来初始化应用程序:两个处理线程和所谓的控制线程,控制这两个处理线程。
控制线程获取图像并将其传递给处理线程,处理线程随后处理图像并传回结果。控制线程收集结果,但不显示结果本身,因为HALCON窗口中的所有活动都必须由创建的线程执行。
演示程序的运行效果
本文源代码
注意:下面的演示程序的源码需要扫码支付才可以看到。
如果你觉得不想支付,那么可以在CSDN下载中去下载,(https://download.csdn.net/download/suneggs/12556535)
或者通过看后面的代码分析,其实也可以自己完成测试代码。
源码解读
(一)按下初始化按钮后的初始化代码
HOperatorSet.SetSystem("parallelize_operators", "false");
首先,自动操作器并行化被关闭,否则这两种机制将使用超过可用内核/处理器数量的内核,从而减慢应用程序的速度,而不是加快应用程序的速度。如果系统具有两个以上的核心或处理器,可以设置true,勇哥测试过是可以的。
然后,我们创建一个HDevEngine实例,并设置设置外部过程路径。
HDevEngine MyEngine = new HDevEngine(); string ProcedurePath = halconExamples + @"\hdevengine\procedures"; ... MyEngine.SetProcedurePath(ProcedurePath);
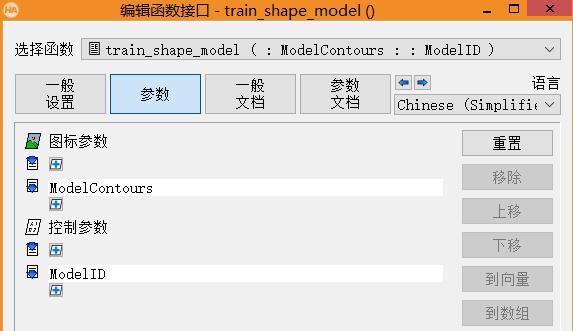
执行外部过程train_shape_model创建模板。
HDevProcedureCall ProcTrain;
HDevProcedure Procedure = new HDevProcedure("train_shape_model");
ProcTrain = new HDevProcedureCall(Procedure);
ProcTrain.Execute();取得返回参数ModelID,ModelContours
public HTuple ModelID;
public HXLD ModelContours;
ModelID = ProcTrain.GetOutputCtrlParamTuple("ModelID");
ModelContours = ProcTrain.GetOutputIconicParamXld("ModelContours");创建并初始化两个处理线程
public class EngineThread{
Thread WorkerObject = null;
HDevProcedureCall ProcCall;
HTuple ModelID;
HXLD ModelContours;
public AutoResetEvent EngineIsReady;
public EngineThread(Form1 mainForm) {
ModelID = mainForm.ModelID;
ModelContours = mainForm.ModelContours;
EngineIsReady = new AutoResetEvent(true);
}
EngineThread WorkerEngine1; // processing
threadEngineThread WorkerEngine2; // processing threadAutoResetEvent Engine1Ready;
AutoResetEvent Engine2Ready;
WorkerEngine1 = new EngineThread(this);
WorkerEngine1.Init();
Engine1Ready = WorkerEngine1.EngineIsReady;
WorkerEngine2 = new EngineThread(this);
WorkerEngine2.Init();
Engine2Ready = WorkerEngine2.EngineIsReady;EngineThread类的源代码见上面。
这个类初始化时对外部函数detect_shape.hdvp进行了赋初值。
public void Init(){
HDevProcedure Procedure = new HDevProcedure("detect_shape");
ProcCall = new HDevProcedureCall(Procedure);
ProcCall.SetInputCtrlParamTuple("ModelID", ModelID);
ProcCall.SetInputIconicParamObject("ModelContours", ModelContours);
}最后,我们初始化图像采集。句柄存储在窗体的变量中,以便控制线程可以访问它。
private HFramegrabber AcqHandle;
string ImagePath = halconExamples + "/images/cap_illumination";
AcqHandle=new HFramegrabber("File",1,1,0,0,0,0,"default",-1,"default",
-1,"default",ImagePath,"default",-1,-1);(二)按下run按钮后的处理过程
private void RunButton_Click(object sender, System.EventArgs e)
{
WorkerEngine1.Run();
WorkerEngine2.Run();EngineThread类相应的方法Run()创建并启动线程并设置“就绪”信号
public void Run()
{
EngineIsReady.Set();
WorkerObject = new Thread(new ThreadStart(Process));
WorkerObject.Start();
}然后,主线程启动控制线程
ControlThread = new Thread(new ThreadStart(Run)); ControlThread.Start();
从控制线程触发处理线程
控制线程的操作包含在方法Run中. 只要没有按下Stop,它就会一直等到某个处理线程准备就绪。
EngineThread WorkerEngine; // variable to switch between processing threads
public void Run()
{
HImage Image;
while (!StopEventHandle.WaitOne(0, true))
{
if (Engine1Ready.WaitOne(0, true))
WorkerEngine = WorkerEngine1;
else if(Engine2Ready.WaitOne(0, true))
WorkerEngine = WorkerEngine2;
else
continue;
Image = AcqHandle.GrabImageAsync(-1);
WorkerEngine.SetImage(Image);然后,它获取下一个图像并将其传递给处理线程,线程将其存储在成员变量。
private HImage
InputImage = null;
public void SetImage(HImage Img)
{
InputImage = Img;
}(三)其它的处理逻辑
这是工作线程主要的工作,就是运行外部函数detect_shape.hdvp
public void Process()
{
while (!DelegatedStopEvent.WaitOne(0, true))
{
if (InputImage == null)
continue;
ProcCall.SetInputIconicParamObject("Image", InputImage);
ProcCall.Execute();为了传递结果,定义了一个数据结构ResultContainer类来存储相关数据:处理后的图像以及找到的cap的位置、方向和轮廓。
public class ResultContainer{
public HImage InputImage;
public HXLD FoundContours;
public double Row;
public double Column;
public double Angle;
}执行该过程后,处理线程访问其结果,并将其与处理后的图像一起存储在结果类(“结果容器”)的新实例中。
ResultContainer Result;
HTuple ResultTuple;
Result = new ResultContainer();
Result.InputImage = InputImage;
Result.FoundContours = ProcCall.GetOutputIconicParamXld("ResultObject");
ResultTuple = ProcCall.GetOutputCtrlParamTuple("ResultData");
Result.Row = ResultTuple[0];
Result.Column = ResultTuple[1];
Result.Angle = ResultTuple[2];然后,处理线程通过将结果容器追加到列表中,将其传递给控制线程。
ResultMutex.WaitOne(); ResultList.Add(Result); ResultMutex.ReleaseMutex();
此列表是主线程的成员变量它由互斥锁保护,以便线程可以安全地访问它
ArrayList ResultList;
Mutex ResultMutex;
public EngineThread(Form1 mainForm)
{
ResultList = mainForm.ResultList;
ResultMutex = mainForm.ResultDataMutex;
}控制线程不执行结果本身的显示,而是通过方法调用将其委托给主线程
for( ;Count > 0;Count--)
Invoke(DelegatedDisplay);
The necessary members are defined by the form.
delegate void FuncDelegate();
FuncDelegate DelegatedDisplay;
public MultiThreadingForm()
{
DelegatedDisplay = new FuncDelegate(DisplayResults);
}注意,自HALCON 12以来,所有HALCON可视化运算符都自动委托给正确的线程,如“Threading Issues with Graphics”一章中所述。
显示结果
实际显示由DisplayResults方法执行。每次调用时,它都会从结果列表中移除一个项,并显示处理后的图像和找到的cap的轮廓。然后,释放相应的HALCON内部内存。
public void DisplayResults()
{
ResultDataMutex.WaitOne();
Result = (ResultContainer) ResultList[0];
ResultList.Remove(Result);
ResultDataMutex.ReleaseMutex();
Window.ClearWindow();
Window.DispImage(Result.InputImage);
Window.DispObj(Result.FoundContours);
Result.InputImage.Dispose();
Result.FoundContours.Dispose();
}程序中用到的halcon外部函数
train_shape_model.hdvp 的参数
源码:
read_image (Image, './cap_illumination/cap_illumination_01.png') gen_circle (Circle, 495, 630, 290) reduce_domain (Image, Circle, ImageReduced) * create_scaled_shape_model (ImageReduced, 'auto', 0, rad(360), 'auto', 0.8, 1.2, 'auto', 'auto', 'use_polarity', 'auto', 'auto', ModelID) get_shape_model_contours (ModelContours, ModelID, 1) return ()
train_shape_model.hdvp的参数
源码:
read_image (Image, './cap_illumination/cap_illumination_01.png') gen_circle (Circle, 495, 630, 290) reduce_domain (Image, Circle, ImageReduced) * create_scaled_shape_model (ImageReduced, 'auto', 0, rad(360), 'auto', 0.8, 1.2, 'auto', 'auto', 'use_polarity', 'auto', 'auto', ModelID) get_shape_model_contours (ModelContours, ModelID, 1) return ()
detect_shape.hdvp的参数

源码:
find_scaled_shape_model (Image, ModelID, 0, rad(360), 0.98, 1.02, 0.4, 1, 1, 'least_squares_high', [5,3], 0.9, Rows, Columns, Angles, Scale, Score) if (|Rows| > 0) Row := Rows[0] Column := Columns[0] Angle := Angles[0] vector_angle_to_rigid (0, 0, 0, Row, Column, Angle, HomMat2D) affine_trans_contour_xld (ModelContours, ResultObject, HomMat2D) DetectionSuccessful := 'true' else Row := -1 Column := -1 Angle := -1 DetectionSuccessful := 'false' endif ResultData := [Row,Column,Angle] return ()
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")
:运行时api的使用,vs环境下的联调")

:运行时api的说明")
Qt Widgets Designer界面设计器和界面应用")



:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





